正在加载图片...
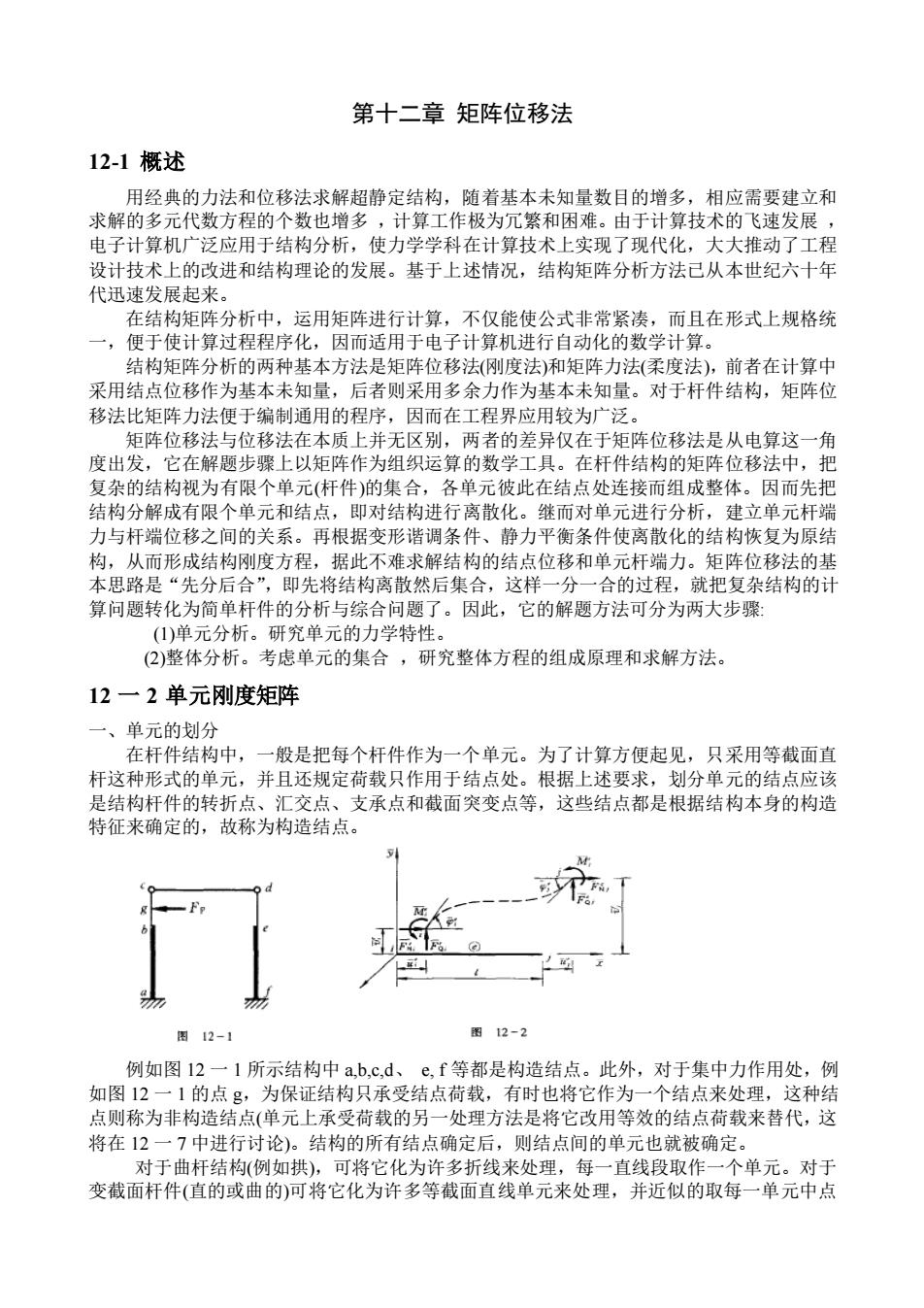
第十二章矩阵位移法 12-1概述 用经典的力法和位移法求解超静定结构,随着基本未知量数目的增多,相应需要建立和 求解的多元代数方程的个数也增多,计算工作极为冗繁和困难。由于计算技术的飞速发展, 电子计算机广泛应用于结构分析,使力学学科在计算技术上实现了现代化,大大推动了工程 设计技术上的改进和结构理论的发展。基于上述情况,结构矩阵分析方法已从本世纪六十年 代迅速发展起来 在结构矩阵分析中,运用矩阵进行计算,不仅能使公式非常紧凑,而且在形式上规格统 一,便于使计算过程程序化,因而适用于电子计算机进行自动化的数学计算。 结构矩阵分析的两种基本方法是矩阵位移法(刚度法)和矩阵力法(柔度法),前者在计算中 采用结点位移作为基本未知量,后者则采用多余力作为基本未知量。对于杆件结构,矩阵位 移法比矩阵力法便于编制通用的程序,因而在工程界应用较为广泛。 矩阵位移法与位移法在本质上 无区别,两者的差异仅在于矩 车位移法是从电算这一角 度出发,它在解题步骤上以矩阵作为组织运算的数学工具。在杆件结构的矩阵位移法中,把 复杂的结构视为有限个单元(杆件)的集合,各单元彼此在结点处连接而组成整体。因而先把 结构分解成有限个单元和结点,即对结构进行离散化。继而对单元进行分析,建立单元杆端 力与杆端位移之间的关系。再根据变形谐调条件、静力平衡条件使离散化的结构恢复为原结 构,从而形成结构刚度方程, 居此不难求解结构的结点位移和单元杆端 力 矩阵位移法的 本思路是 先分后合”,即先将结构离散然后集合,这样一分一合的过程,就把复杂结构的计 算问题转化为简单杆件的分析与综合问题了。因此,它的解题方法可分为两大步骤: ()单元分析。研究单元的力学特性。 (2)整体分析。考虑单元的集合,研究整体方程的组成原理和求解方法。 12一2单元刚度矩阵 一、单元的划分 在杆件结构中,一般是把每个杆件作为一个单元。为了计算方便起见,只采用等截面直 杆这种形式的单元,并且还规定荷载只作用于结点处。根据上述要求,划分单元的结点应该 是结物杆件的转折占 、支承点和截面突变点等,这些结点都是根据结构本身的构造 特征来确定的,故称为构造结 -Tp 图12-1 图12-2 例如图12一1所示结构中a,b,c,d、 e,f等都是构造结点。此外,对于集中力作用处,例 如图12 的点g,为保证结构只承受结点荷载,有时也将它作 结点来处理 这种结 点则称为非构造结点(单元上承受荷载的另一处理方法是将它改用等效的结点荷载来替代,这 将在12一7中进行讨论)。结构的所有结点确定后,则结点间的单元也就被确定。 对于曲杆结构(例如拱),可将它化为许多折线来处理,每一直线段取作一个单元。对于 变截面杆件(直的或曲的)可将它化为许多等截面直线单元来处理,并近似的取每一单元中点第十二章 矩阵位移法 12-1 概述 用经典的力法和位移法求解超静定结构,随着基本未知量数目的增多,相应需要建立和 求解的多元代数方程的个数也增多 ,计算工作极为冗繁和困难。由于计算技术的飞速发展 , 电子计算机广泛应用于结构分析,使力学学科在计算技术上实现了现代化,大大推动了工程 设计技术上的改进和结构理论的发展。基于上述情况,结构矩阵分析方法已从本世纪六十年 代迅速发展起来。 在结构矩阵分析中,运用矩阵进行计算,不仅能使公式非常紧凑,而且在形式上规格统 一,便于使计算过程程序化,因而适用于电子计算机进行自动化的数学计算。 结构矩阵分析的两种基本方法是矩阵位移法(刚度法)和矩阵力法(柔度法),前者在计算中 采用结点位移作为基本未知量,后者则采用多余力作为基本未知量。对于杆件结构,矩阵位 移法比矩阵力法便于编制通用的程序,因而在工程界应用较为广泛。 矩阵位移法与位移法在本质上并无区别,两者的差异仅在于矩阵位移法是从电算这一角 度出发,它在解题步骤上以矩阵作为组织运算的数学工具。在杆件结构的矩阵位移法中,把 复杂的结构视为有限个单元(杆件)的集合,各单元彼此在结点处连接而组成整体。因而先把 结构分解成有限个单元和结点,即对结构进行离散化。继而对单元进行分析,建立单元杆端 力与杆端位移之间的关系。再根据变形谐调条件、静力平衡条件使离散化的结构恢复为原结 构,从而形成结构刚度方程,据此不难求解结构的结点位移和单元杆端力。矩阵位移法的基 本思路是“先分后合”,即先将结构离散然后集合,这样一分一合的过程,就把复杂结构的计 算问题转化为简单杆件的分析与综合问题了。因此,它的解题方法可分为两大步骤: (1)单元分析。研究单元的力学特性。 (2)整体分析。考虑单元的集合 ,研究整体方程的组成原理和求解方法。 12 一 2 单元刚度矩阵 一、单元的划分 在杆件结构中,一般是把每个杆件作为一个单元。为了计算方便起见,只采用等截面直 杆这种形式的单元,并且还规定荷载只作用于结点处。根据上述要求,划分单元的结点应该 是结构杆件的转折点、汇交点、支承点和截面突变点等,这些结点都是根据结构本身的构造 特征来确定的,故称为构造结点。 例如图 12 一 1 所示结构中 a,b,c,d、 e, f 等都是构造结点。此外,对于集中力作用处,例 如图 12 一 1 的点 g,为保证结构只承受结点荷载,有时也将它作为一个结点来处理,这种结 点则称为非构造结点(单元上承受荷载的另一处理方法是将它改用等效的结点荷载来替代,这 将在 12 一 7 中进行讨论)。结构的所有结点确定后,则结点间的单元也就被确定。 对于曲杆结构(例如拱),可将它化为许多折线来处理,每一直线段取作一个单元。对于 变截面杆件(直的或曲的)可将它化为许多等截面直线单元来处理,并近似的取每一单元中点