点击下载:电子科技大学:《生物医学信号处理 Biomedical Signal Processing》课程教学资源(课件讲稿)Lecture 5.2 Biomedical Applications of Kalman Filter
正在加载图片...
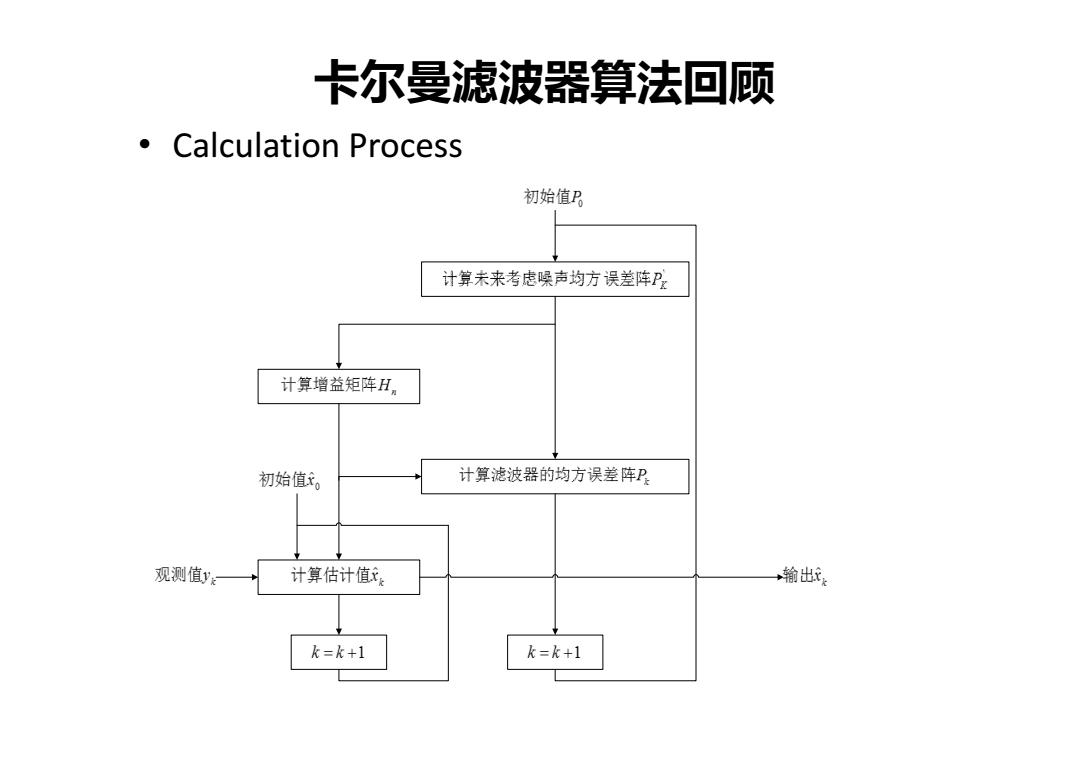
卡尔曼滤波器算法回顾 0 Calculation Process 初始值卫 计算未来考虑噪声均方误差阵P 计算增益矩阵H 初始值。 计算滤波器的均方误差阵P 观测值→ 计算估计值 +输出好 k=k+1 k=k+1卡尔曼滤波器算法回顾 • Calculation Process
<<向上翻页
向下翻页>>
点击下载:电子科技大学:《生物医学信号处理 Biomedical Signal Processing》课程教学资源(课件讲稿)Lecture 5.2 Biomedical Applications of Kalman Filter
©2008-现在 cucdc.com 高等教育资讯网 版权所有