正在加载图片...
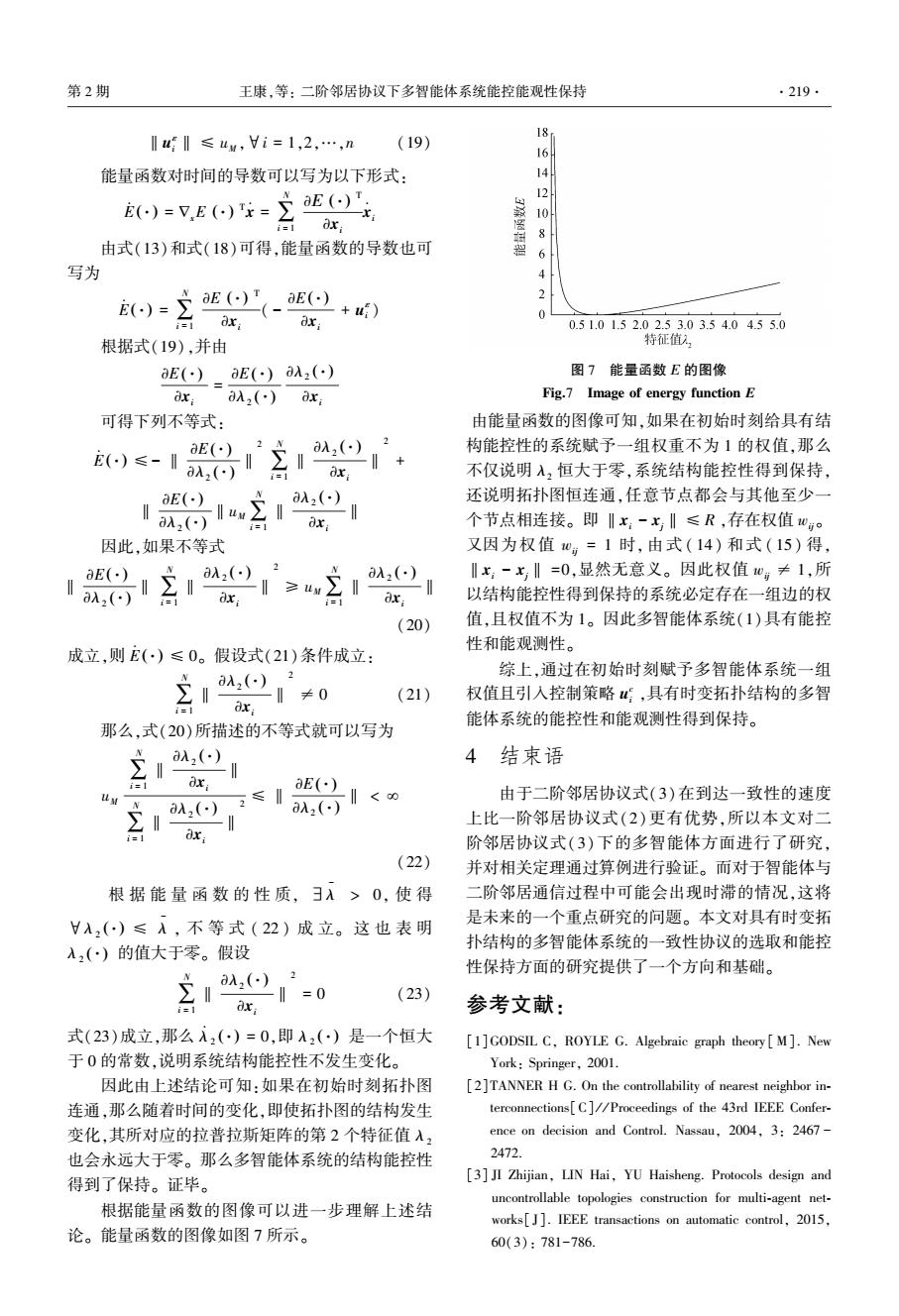
第2期 王康,等:二阶邻居协议下多智能体系统能控能观性保持 ·219 lu‖≤uw,i=1,2,…,n (19) 16 能量函数对时间的导数可以写为以下形式: 14 E()=VE()x=】 E)' ox. 10 由式(13)和式(18)可得,能量函数的导数也可 写为 =26'(-Eu+d) 2 ox. 0.51.01.52.02.53.03.54.04.55.0 根据式(19),并由 特征值2, E()=E(),() 图7能量函数E的图像 ac:a入2()ax: Fig.7 Image of energy function E 可得下列不等式: 由能量函数的图像可知,如果在初始时刻给具有结 E)≤-1aA,) 2N 2()2 构能控性的系统赋予一组权重不为1的权值,那么 2+ i=1 ox: 不仅说明入,恒大于零,系统结构能控性得到保持, a入,c)∥uw∑ aE() aA2(·) 还说明拓扑图恒连通,任意节点都会与其他至少一 ax, 个节点相连接。即‖x:-x‖≤R,存在权值0 因此,如果不等式 又因为权值0:=1时,由式(14)和式(15)得, M,()2 1含 A2() 川x:-x‖=0,显然无意义。因此权值e≠1,所 ox: 以结构能控性得到保持的系统必定存在一组边的权 (20) 值,且权值不为1。因此多智能体系统(1)具有能控 性和能观测性。 成立,则E(·)≤0。假设式(21)条件成立: A2().2 综上,通过在初始时刻赋予多智能体系统一组 立1 ≠0 (21) 权值且引入控制策略,具有时变拓扑结构的多智 能体系统的能控性和能观测性得到保持。 那么,式(20)所描述的不等式就可以写为 A2(·) 4结束语 =1 M,()2 ≤‖ 得1s 由于二阶邻居协议式(3)在到达一致性的速度 上比一阶邻居协议式(2)更有优势,所以本文对二 ox. 阶邻居协议式(3)下的多智能体方面进行了研究, (22) 并对相关定理通过算例进行验证。而对于智能体与 根据能量函数的性质,3入>0,使得 二阶邻居通信过程中可能会出现时滞的情况,这将 H入2()≤入,不等式(22)成立。这也表明 是未来的一个重点研究的问题。本文对具有时变拓 入2(·)的值大于零。假设 扑结构的多智能体系统的一致性协议的选取和能控 2 性保持方面的研究提供了一个方向和基础。 立 aA,( -1=0 (23) i= 参考文献: 式(23)成立,那么入2()=0,即入2()是一个恒大 [1]GODSIL C,ROYLE G.Algebraie graph theory M].New 于0的常数,说明系统结构能控性不发生变化。 York:Springer,2001. 因此由上述结论可知:如果在初始时刻拓扑图 [2]TANNER H G.On the controllability of nearest neighbor in- 连通,那么随着时间的变化,即使拓扑图的结构发生 terconnections[C]//Proceedings of the 43rd IEEE Confer- 变化,其所对应的拉普拉斯矩阵的第2个特征值入? ence on decision and Control.Nassau,2004,3:2467- 也会永远大于零。那么多智能体系统的结构能控性 2472. 得到了保持。证毕。 [3]JI Zhijian,LIN Hai,YU Haisheng.Protocols design and uncontrollable topologies construction for multi-agent net- 根据能量函数的图像可以进一步理解上述结 works[J].IEEE transactions on automatic control,2015, 论。能量函数的图像如图7所示。 60(3):781-786.‖u ε i ‖ ≤ uM ,∀i = 1,2,…,n (19) 能量函数对时间的导数可以写为以下形式: E · (·) = ÑxE (·) T x · = ∑ N i = 1 ∂Ε (·) T ∂xi x · i 由式(13)和式(18)可得,能量函数的导数也可 写为 E · (·) = ∑ N i = 1 ∂E (·) T ∂xi ( - ∂E(·) ∂xi + u ε i ) 根据式(19),并由 ∂E(·) ∂xi = ∂E(·) ∂λ2 (·) ∂λ2 (·) ∂xi 可得下列不等式: E · (·) ≤- ‖ ∂E(·) ∂λ2 (·) ‖ 2 ∑ N i = 1 ‖ ∂λ2 (·) ∂xi ‖ 2 + ‖ ∂E(·) ∂λ2 (·) ‖uM∑ N i = 1 ‖ ∂λ2 (·) ∂xi ‖ 因此,如果不等式 ‖ ∂E(·) ∂λ2 (·) ‖ ∑ N i = 1 ‖ ∂λ2 (·) ∂xi ‖ 2 ≥ uM∑ N i = 1 ‖ ∂λ2 (·) ∂xi ‖ (20) 成立,则 E · (·) ≤ 0。 假设式(21)条件成立: ∑ N i = 1 ‖ ∂λ2 (·) ∂xi ‖ 2 ≠ 0 (21) 那么,式(20)所描述的不等式就可以写为 uM ∑ N i = 1 ‖ ∂λ2 (·) ∂xi ‖ ∑ N i = 1 ‖ ∂λ2 (·) ∂xi ‖ 2 ≤ ‖ ∂E(·) ∂λ2 (·) ‖ < ¥ (22) 根 据 能 量 函 数 的 性 质, ∃λ - > 0, 使 得 ∀λ2 (·) ≤ λ - , 不 等 式 ( 22 ) 成 立。 这 也 表 明 λ2 (·) 的值大于零。 假设 ∑ N i = 1 ‖ ∂λ2 (·) ∂xi ‖ 2 = 0 (23) 式(23)成立,那么 λ · 2 (·) = 0,即 λ2 (·) 是一个恒大 于 0 的常数,说明系统结构能控性不发生变化。 因此由上述结论可知:如果在初始时刻拓扑图 连通,那么随着时间的变化,即使拓扑图的结构发生 变化,其所对应的拉普拉斯矩阵的第 2 个特征值 λ2 也会永远大于零。 那么多智能体系统的结构能控性 得到了保持。 证毕。 根据能量函数的图像可以进一步理解上述结 论。 能量函数的图像如图 7 所示。 图 7 能量函数 Ε 的图像 Fig.7 Image of energy function E 由能量函数的图像可知,如果在初始时刻给具有结 构能控性的系统赋予一组权重不为 1 的权值,那么 不仅说明 λ2 恒大于零,系统结构能控性得到保持, 还说明拓扑图恒连通,任意节点都会与其他至少一 个节点相连接。 即 ‖xi - xj‖ ≤ R ,存在权值 wij。 又因为权值 wij = 1 时, 由式 ( 14) 和式 ( 15) 得, ‖xi - xj‖ =0,显然无意义。 因此权值 wij ≠ 1,所 以结构能控性得到保持的系统必定存在一组边的权 值,且权值不为 1。 因此多智能体系统(1)具有能控 性和能观测性。 综上,通过在初始时刻赋予多智能体系统一组 权值且引入控制策略 u c i ,具有时变拓扑结构的多智 能体系统的能控性和能观测性得到保持。 4 结束语 由于二阶邻居协议式(3)在到达一致性的速度 上比一阶邻居协议式(2)更有优势,所以本文对二 阶邻居协议式(3)下的多智能体方面进行了研究, 并对相关定理通过算例进行验证。 而对于智能体与 二阶邻居通信过程中可能会出现时滞的情况,这将 是未来的一个重点研究的问题。 本文对具有时变拓 扑结构的多智能体系统的一致性协议的选取和能控 性保持方面的研究提供了一个方向和基础。 参考文献: [1]GODSIL C, ROYLE G. Algebraic graph theory[ M]. New York: Springer, 2001. [2]TANNER H G. On the controllability of nearest neighbor in⁃ terconnections[C] / / Proceedings of the 43rd IEEE Confer⁃ ence on decision and Control. Nassau, 2004, 3: 2467 - 2472. [3] JI Zhijian, LIN Hai, YU Haisheng. Protocols design and uncontrollable topologies construction for multi⁃agent net⁃ works[ J]. IEEE transactions on automatic control, 2015, 60(3): 781-786. 第 2 期 王康,等: 二阶邻居协议下多智能体系统能控能观性保持 ·219·