正在加载图片...
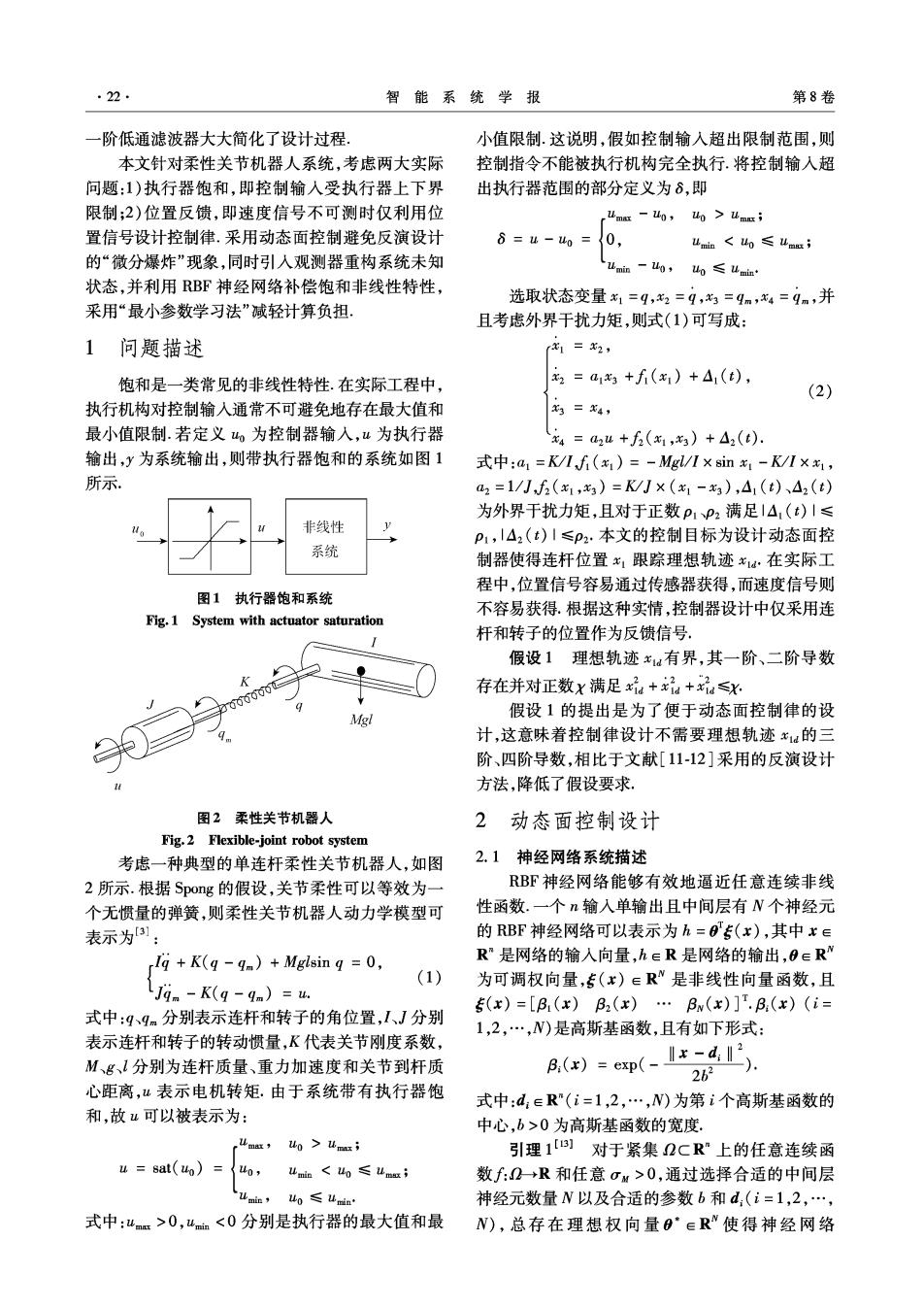
·22 智能系统学报 第8卷 一阶低通滤波器大大简化了设计过程. 小值限制.这说明,假如控制输入超出限制范围,则 本文针对柔性关节机器人系统,考虑两大实际 控制指令不能被执行机构完全执行.将控制输入超 问题:1)执行器饱和,即控制输入受执行器上下界 出执行器范围的部分定义为δ,即 限制;2)位置反馈,即速度信号不可测时仅利用位 置信号设计控制律.采用动态面控制避免反演设计 6=u-u0={0, umin<ho≤uma; 的“微分爆炸”现象,同时引入观测器重构系统未知 umin-g,o≤umtn 状态,并利用RBF神经网络补偿饱和非线性特性, 选取状态变量x1=q,2=9,为=qm,x4=9m,并 采用“最小参数学习法”减轻计算负担, 且考虑外界干扰力矩,则式(1)可写成: 1问题描述 =x2, 饱和是一类常见的非线性特性.在实际工程中, 2=a13+f(x1)+△1(t), (2) 执行机构对控制输入通常不可避免地存在最大值和 3=名4, 最小值限制.若定义,为控制器输人,u为执行器 x4=a2u+f2(1,x3)+△2(t) 输出,y为系统输出,则带执行器饱和的系统如图1 式中:a1=K/If(x1)=-Mgl/I×sinx1-K/I×x1, 所示. a2=1/J,f2(x1,x3)=KWJ×(x1-x3),△1(t)、△2(t) 为外界干扰力矩,且对于正数p1P2满足I△(t)|≤ 非线性 p1,|△2()I≤P2·本文的控制目标为设计动态面控 系统 制器使得连杆位置x,跟踪理想轨迹x在实际工 程中,位置信号容易通过传感器获得,而速度信号则 图1执行器饱和系统 不容易获得.根据这种实情,控制器设计中仅采用连 Fig.1 System with actuator saturation 杆和转子的位置作为反馈信号. 假设1理想轨迹u有界,其一阶、二阶导数 存在并对正数X满足x++x品≤X Mgl 假设1的提出是为了便于动态面控制律的设 计,这意味着控制律设计不需要理想轨迹x的三 阶、四阶导数,相比于文献[11-12]采用的反演设计 方法,降低了假设要求. 图2柔性关节机器人 2动态面控制设计 Fig.2 Flexible-joint robot system 考虑一种典型的单连杆柔性关节机器人,如图 2.1神经网络系统描述 2所示.根据Spong的假设,关节柔性可以等效为一 RBF神经网络能够有效地逼近任意连续非线 个无惯量的弹簧,则柔性关节机器人动力学模型可 性函数.一个n输入单输出且中间层有N个神经元 表示为31: 的RBF神经网络可以表示为h=O专(x),其中x∈ Ig +K(q-9m)Mglsin q =0, R”是网络的输入向量,h∈R是网络的输出,0∈R" (1) 为可调权向量,专(x)∈R“是非线性向量函数,且 Jgm-K(q-qm)=u. 式中:99m分别表示连杆和转子的角位置,I、J分别 5(xr)=[B(x)B2(x)…Bw(x)]I.B,(x)(i= 1,2,…,N)是高斯基函数,且有如下形式: 表示连杆和转子的转动惯量,K代表关节刚度系数, M、g、1分别为连杆质量、重力加速度和关节到杆质 BC)-e( 心距离,“表示电机转矩.由于系统带有执行器饱 式中:d∈R(i=1,2,…,N)为第i个高斯基函数的 和,故u可以被表示为: 中心,b>0为高斯基函数的宽度. 业m,l0>认max; 引理1)】对于紧集2CR”上的任意连续函 u=8at(o)= 40, umin<山o≤umw; 数f:2→R和任意σM>0,通过选择合适的中间层 uain,ho≤Umin' 神经元数量N以及合适的参数b和d:(i=1,2,…, 式中:wm>0,umn<0分别是执行器的最大值和最 N),总存在理想权向量0°∈R“使得神经网络