正在加载图片...
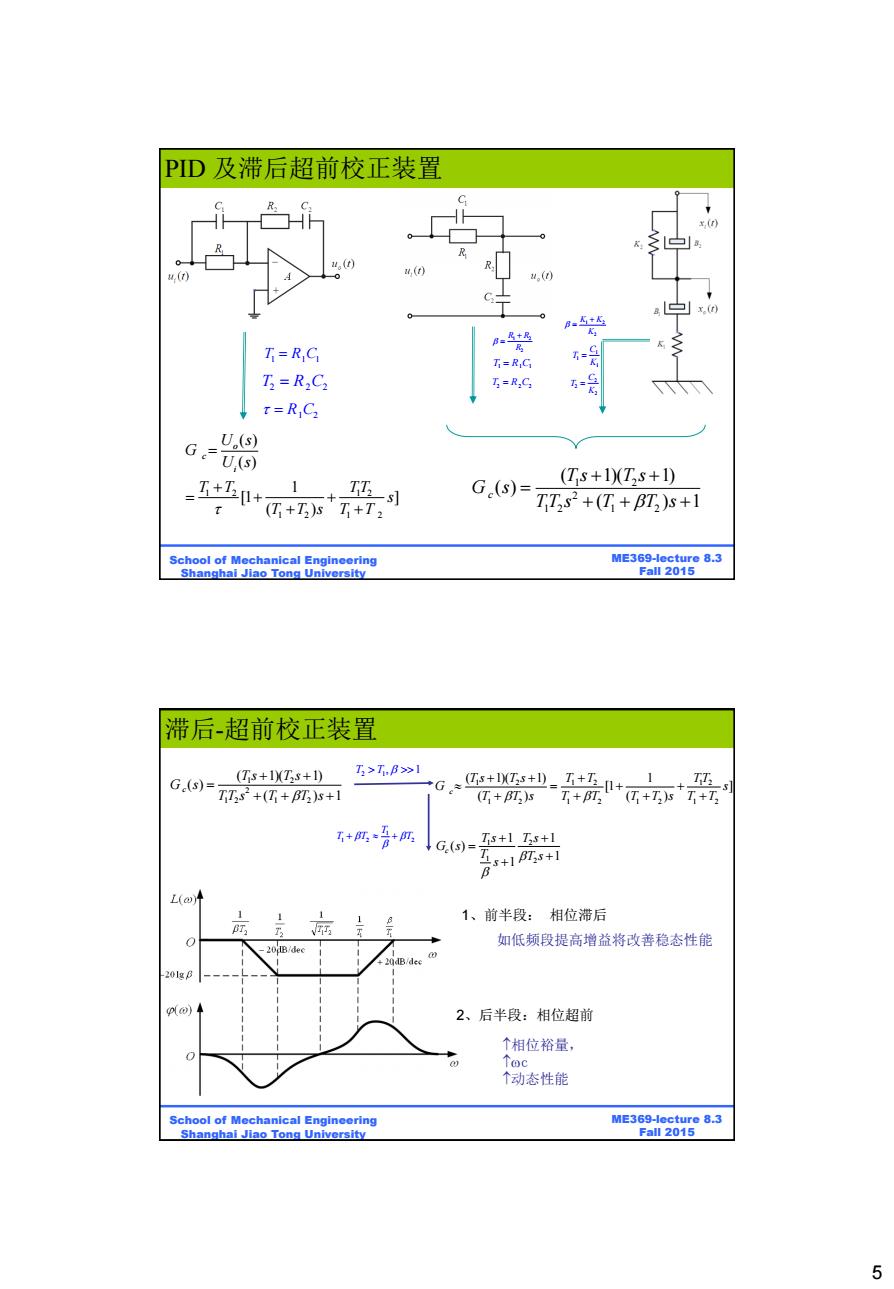
PID及滞后超前校正装置 B=5+ + T=RC T=R2C2 T=R,C T=R C2 U.(s) GU(S) -+五+ 1 旺 (Ts+1)(T,s+1) G.(S)= T (T+T)s T+T, TTs2+(T+BT)s+1 School of Mechanical Engineering ME369-lecture 8.3 Shanghai Jiao Tong University Fal12015 滞后-超前校正装置 (Ts+1)T,s+1) T3>T.B>1 G(s)= G s+lIs+D_I+五+ 1 TTs+(T+BT)s+1 (T+BT)s T+BT, (T+T)s T+T, G(s)= Ts+1 Ts+l 工s+1阿,+1 L(o 1、前半段:相位滞后 0 如低频段提高增益将改善稳态性能 20dB/dec 20dB/dee 201g6 p@)4 2、后半段:相位超前 ↑相位裕量, Toc ↑动态性能 School of Mechanical Engineering ME369-lecture 8.3 Shanghai Jiao Tong University Fall 2015 55 BE315-Lecture 8.3 Fall 2011 ME369-lecture 8.3 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 1 2 2 1 2 1 2 ( 1)( 1) ( ) ( ) 1 c T s T s G s TT s T T s 1 2 2 R R R T R C 1 1 1 T R C 2 2 2 1 2 2 K K K 1 1 1 C T K 2 2 2 C T K PID 及滞后超前校正装置 1 2 1 2 1 2 1 2 ( ) ( ) 1 [1 ] ( ) o c i U s G U s T T TT s T T s T T T R C 1 1 1 T R C 2 2 2 R C1 2 BE315-Lecture 8.3 Fall 2011 ME369-lecture 8.3 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 1 2 2 1 2 1 2 ( 1)( 1) ( ) ( ) 1 c T s T s G s TT s T T s 2 1 T T , 1 1 2 1 2 1 2 1 2 1 2 1 2 1 2 ( 1)( 1) 1 [1 ] ( ) ( ) c T s T s T T TT G s T T s T T T T s T T 1 1 2 2 T T T T 1 2 1 2 1 1 ( ) 1 1 c T s T s G s T T s s 滞后-超前校正装置 相位裕量, c 动态性能 如低频段提高增益将改善稳态性能 1、前半段: 相位滞后 2、后半段:相位超前