正在加载图片...
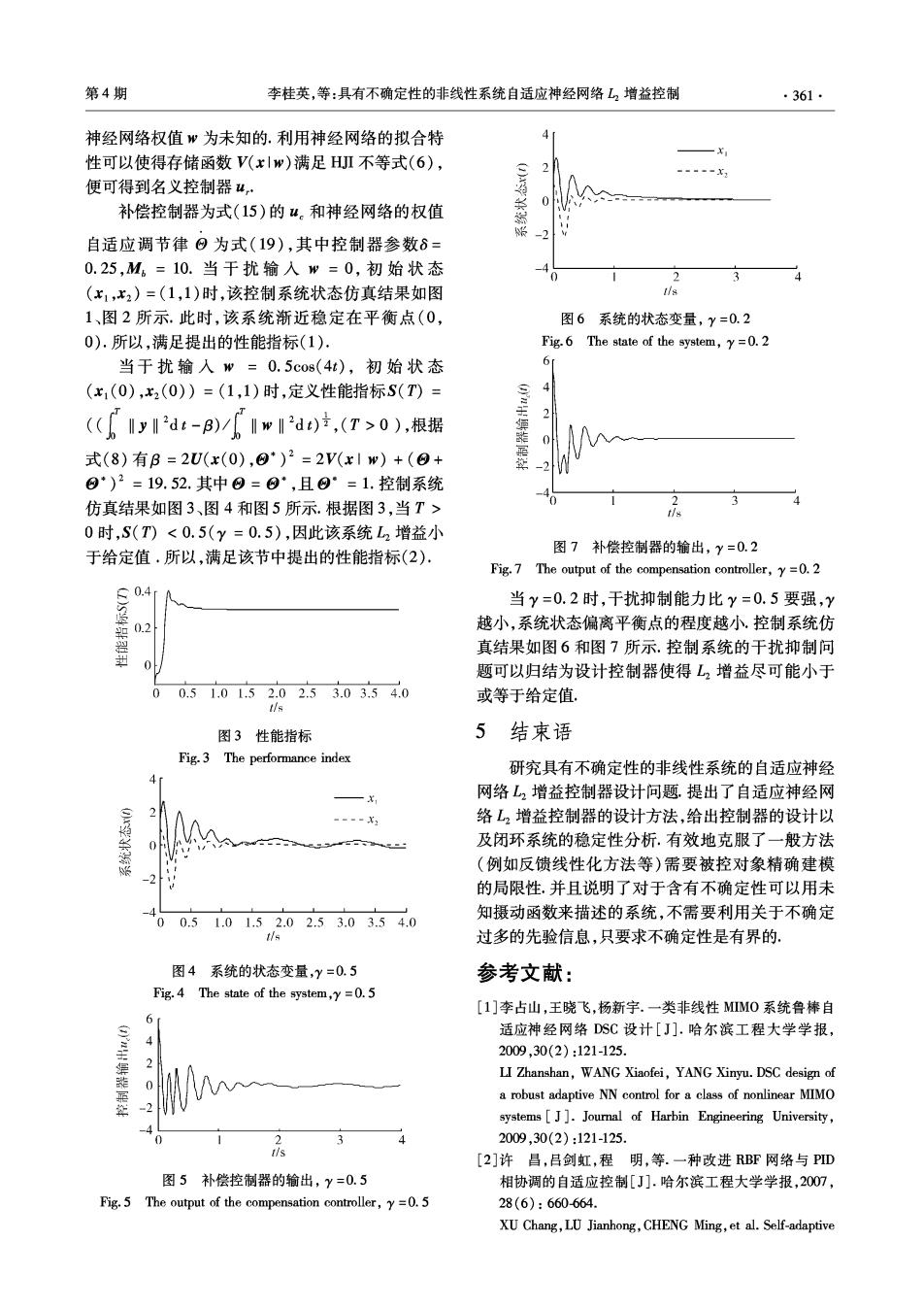
第4期 李桂英,等:具有不确定性的非线性系统自适应神经网络L2增益控制 ·361· 神经网络权值”为未知的.利用神经网络的拟合特 性可以使得存储函数V(x|w)满足HI不等式(6), 2 便可得到名义控制器4· 补偿控制器为式(15)的4。和神经网络的权值 自适应调节律⊙为式(19),其中控制器参数6= 0.25,M。=10.当干扰输入w=0,初始状态 2 (x1,x2)=(1,1)时,该控制系统状态仿真结果如图 1、图2所示.此时,该系统渐近稳定在平衡点(0, 图6系统的状态变量,Y=0.2 0).所以,满足提出的性能指标(1). Fig.6 The state of the system,y=0.2 当干扰输人w=0.5cos(4t),初始状态 (x1(0),2(0))=(1,1)时,定义性能指标S(T)= (IyI2at-B)/Iw2d)立,(T>0),根据 2 式(8)有B=2U(x(0),®*)2=2V(x1w)+(8+ ®·)2=19.52.其中®=8°,且0°=1.控制系统 仿真结果如图3、图4和图5所示.根据图3,当T> t/s 0时,S(T)<0.5(y=0.5),因此该系统L2增益小 于给定值.所以,满足该节中提出的性能指标(2). 图7补偿控制器的输出,y=0.2 Fig.7 The output of the compensation controller,y=0.2 0.4 当y=0.2时,干扰抑制能力比y=0.5要强,y 0.2 越小,系统状态偏离平衡点的程度越小.控制系统仿 真结果如图6和图7所示.控制系统的干扰抑制问 题可以归结为设计控制器使得L2增益尽可能小于 0.51.01.52.02.53.03.54.0 或等于给定值 t/s 图3性能指标 5结束语 Fig.3 The performance index 研究具有不确定性的非线性系统的自适应神经 4 网络L2增益控制器设计问题。提出了自适应神经网 络L2增益控制器的设计方法,给出控制器的设计以 及闭环系统的稳定性分析,有效地克服了一般方法 1 (例如反馈线性化方法等)需要被控对象精确建模 -2 的局限性.并且说明了对于含有不确定性可以用未 0.51.01.52.02.53.03.54.0 知摄动函数来描述的系统,不需要利用关于不确定 tls 过多的先验信息,只要求不确定性是有界的。 图4系统的状态变量,y=0.5 参考文献: Fig.4 The state of the system,y=0.5 [1]李占山,王晓飞,杨新宇.一类非线性MM0系统鲁棒自 6 适应神经网络DSC设计[J].哈尔滨工程大学学报, 2009,30(2):121-125 LI Zhanshan,WANG Xiaofei,YANG Xinyu.DSC design of a robust adaptive NN control for a class of nonlinear MIMO systems[J].Journal of Harbin Engineering University, 2 2009,30(2):121-125. tis [2]许昌,吕剑虹,程明,等.一种改进RBF网络与PID 图5补偿控制器的输出,Y=0.5 相协调的自适应控制[J].哈尔滨工程大学学报,2007, Fig.5 The output of the compensation controller,y=0.5 28(6):660664. XU Chang,LU Jianhong,CHENG Ming,et al.Self-adaptive