正在加载图片...
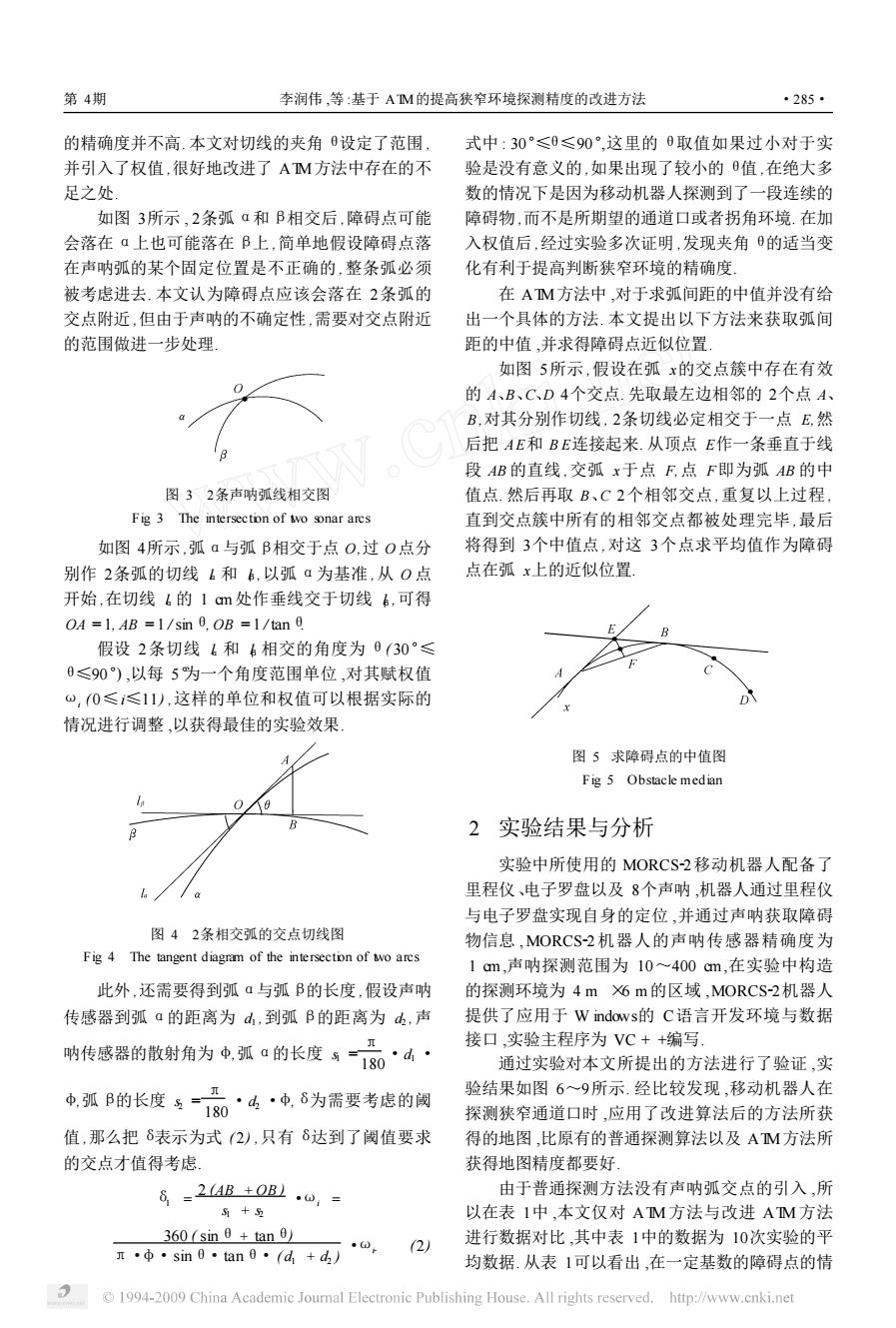
第4期 李润伟,等:基于AM的提高狭窄环境探测精度的改进方法 ·285· 的精确度并不高.本文对切线的夹角设定了范围, 式中:30°≤0≤90°,这里的0取值如果过小对于实 并引入了权值,很好地改进了AM方法中存在的不 验是没有意义的,如果出现了较小的0值,在绝大多 足之处 数的情况下是因为移动机器人探测到了一段连续的 如图3所示,2条弧ā和B相交后,障碍点可能 障碍物,而不是所期望的通道口或者拐角环境.在加 会落在▣上也可能落在B上,简单地假设障碍点落 入权值后,经过实验多次证明,发现夹角0的适当变 在声呐弧的某个固定位置是不正确的,整条弧必须 化有利于提高判断狭窄环境的精确度」 被考虑进去.本文认为障碍点应该会落在2条弧的 在AM方法中,对于求弧间距的中值并没有给 交点附近,但由于声呐的不确定性,需要对交点附近 出一个具体的方法.本文提出以下方法来获取弧间 的范围做进一步处理」 距的中值,并求得障碍点近似位置. 如图5所示,假设在弧x的交点簇中存在有效 0 的A、B、C、D4个交点.先取最左边相邻的2个点A、 B,对其分别作切线,2条切线必定相交于一点E然 后把AE和BE连接起来.从顶点E作一条垂直于线 段AB的直线,交弧x于点F,点F即为弧AB的中 图32条声呐弧线相交图 值点.然后再取B、C2个相邻交点,重复以上过程, Fig 3 The intersection of wo sonar arcs 直到交点簇中所有的相邻交点都被处理完毕,最后 如图4所示,弧a与弧B相交于点O,过0点分 将得到3个中值点,对这3个点求平均值作为障碍 别作2条弧的切线和,以弧ā为基准,从O点 点在弧x上的近似位置 开始,在切线{的1αm处作垂线交于切线,可得 OA =1,AB =1/sin 0,OB =1/tan 0 假设2条切线k和相交的角度为日(30°≤ 0≤90),以每5为一个角度范围单位,对其赋权值 o,(0≤≤11),这样的单位和权值可以根据实际的 情况进行调整,以获得最佳的实验效果 图5求障碍点的中值图 Fig 5 Obstacle median 2实验结果与分析 实验中所使用的MORCS-2移动机器人配备了 里程仪、电子罗盘以及8个声呐,机器人通过里程仪 与电子罗盘实现自身的定位,并通过声呐获取障碍 图42条相交弧的交点切线图 物信息,MORCS-2机器人的声呐传感器精确度为 Fig 4 The tangent diagram of the intersecton of to arcs 1cm,声呐探测范围为10~400cm,在实验中构造 此外,还需要得到弧ā与弧B的长度,假设声呐 的探测环境为4m6m的区域,MORCS-2机器人 传感器到弧a的距离为d,到弧B的距离为d,声 提供了应用于W indows的C语言开发环境与数据 呐传感器的散射角为中弧a的长度4一总0·4· 接口,实验主程序为VC++编写. 通过实验对本文所提出的方法进行了验证,实 电孤B的长度5一0 验结果如图6~9所示.经比较发现,移动机器人在 ·山·中,8为需要考虑的阈 探测狭窄通道口时,应用了改进算法后的方法所获 值,那么把6表示为式(2),只有8达到了阈值要求 得的地图,比原有的普通探测算法以及AM方法所 的交点才值得考虑 获得地图精度都要好」 6=24B±0BL.o,= 由于普通探测方法没有声呐弧交点的引入,所 + 以在表1中,本文仅对AM方法与改进AM方法 360(sin 0 tan 0) (2) 进行数据对比,其中表1中的数据为10次实验的平 rφ·sin0·tan0·d+d) 均数据.从表1可以看出,在一定基数的障碍点的情 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net的精确度并不高. 本文对切线的夹角 θ设定了范围 , 并引入了权值 ,很好地改进了 ATM方法中存在的不 足之处. 如图 3所示 , 2条弧 α和 β相交后 ,障碍点可能 会落在 α上也可能落在 β上 ,简单地假设障碍点落 在声呐弧的某个固定位置是不正确的 ,整条弧必须 被考虑进去. 本文认为障碍点应该会落在 2条弧的 交点附近 ,但由于声呐的不确定性 ,需要对交点附近 的范围做进一步处理. 图 3 2条声呐弧线相交图 Fig. 3 The intersection of two sonar arcs 如图 4所示 ,弧α与弧β相交于点 O,过 O点分 别作 2条弧的切线 αl 和 βl ,以弧 α为基准 ,从 O 点 开始 ,在切线 αl 的 1 cm处作垂线交于切线 βl ,可得 OA = 1, AB = 1 / sinθ, OB = 1 / tanθ. 假设 2条切线 αl 和 βl 相交的角度为 θ( 30°≤ θ≤90°) ,以每 5°为一个角度范围单位 ,对其赋权值 ωi ( 0≤i≤11) ,这样的单位和权值可以根据实际的 情况进行调整 ,以获得最佳的实验效果. 图 4 2条相交弧的交点切线图 Fig. 4 The tangent diagram of the intersection of two arcs 此外 ,还需要得到弧α与弧β的长度 ,假设声呐 传感器到弧 α的距离为 d1 ,到弧 β的距离为 d2 ,声 呐传感器的散射角为 φ,弧 α的长度 s1 = π 180 ·d1 · φ,弧 β的长度 s2 = π 180 ·d2 ·φ,δ为需要考虑的阈 值 ,那么把 δ表示为式 ( 2) ,只有 δ达到了阈值要求 的交点才值得考虑. δ1 = 2 (AB + OB ) s1 + s2 ·ωi = 360 ( sinθ+ tanθ) π·φ·sinθ·tanθ·( d1 + d2 ) ·ωi . (2) 式中 : 30°≤θ≤90°,这里的 θ取值如果过小对于实 验是没有意义的 ,如果出现了较小的 θ值 ,在绝大多 数的情况下是因为移动机器人探测到了一段连续的 障碍物 ,而不是所期望的通道口或者拐角环境. 在加 入权值后 ,经过实验多次证明 ,发现夹角 θ的适当变 化有利于提高判断狭窄环境的精确度. 在 ATM方法中 ,对于求弧间距的中值并没有给 出一个具体的方法. 本文提出以下方法来获取弧间 距的中值 ,并求得障碍点近似位置. 如图 5所示 ,假设在弧 x的交点簇中存在有效 的 A、B、C、D 4个交点. 先取最左边相邻的 2个点 A、 B ,对其分别作切线 , 2条切线必定相交于一点 E,然 后把 AE和 B E连接起来. 从顶点 E作一条垂直于线 段 AB 的直线 ,交弧 x于点 F,点 F即为弧 AB 的中 值点. 然后再取 B、C 2个相邻交点 ,重复以上过程 , 直到交点簇中所有的相邻交点都被处理完毕 ,最后 将得到 3个中值点 ,对这 3个点求平均值作为障碍 点在弧 x上的近似位置. 图 5 求障碍点的中值图 Fig. 5 Obstacle median 2 实验结果与分析 实验中所使用的 MORCS22移动机器人配备了 里程仪、电子罗盘以及 8个声呐 ,机器人通过里程仪 与电子罗盘实现自身的定位 ,并通过声呐获取障碍 物信息 , MORCS22机器人的声呐传感器精确度为 1 cm,声呐探测范围为 10~400 cm,在实验中构造 的探测环境为 4 m ×6 m的区域 ,MORCS22机器人 提供了应用于 W indows的 C语言开发环境与数据 接口 ,实验主程序为 VC + +编写. 通过实验对本文所提出的方法进行了验证 ,实 验结果如图 6~9所示. 经比较发现 ,移动机器人在 探测狭窄通道口时 ,应用了改进算法后的方法所获 得的地图 ,比原有的普通探测算法以及 ATM方法所 获得地图精度都要好. 由于普通探测方法没有声呐弧交点的引入 ,所 以在表 1中 ,本文仅对 ATM 方法与改进 ATM 方法 进行数据对比 ,其中表 1中的数据为 10次实验的平 均数据. 从表 1可以看出 ,在一定基数的障碍点的情 第 4期 李润伟 ,等 :基于 ATM的提高狭窄环境探测精度的改进方法 ·285·