正在加载图片...
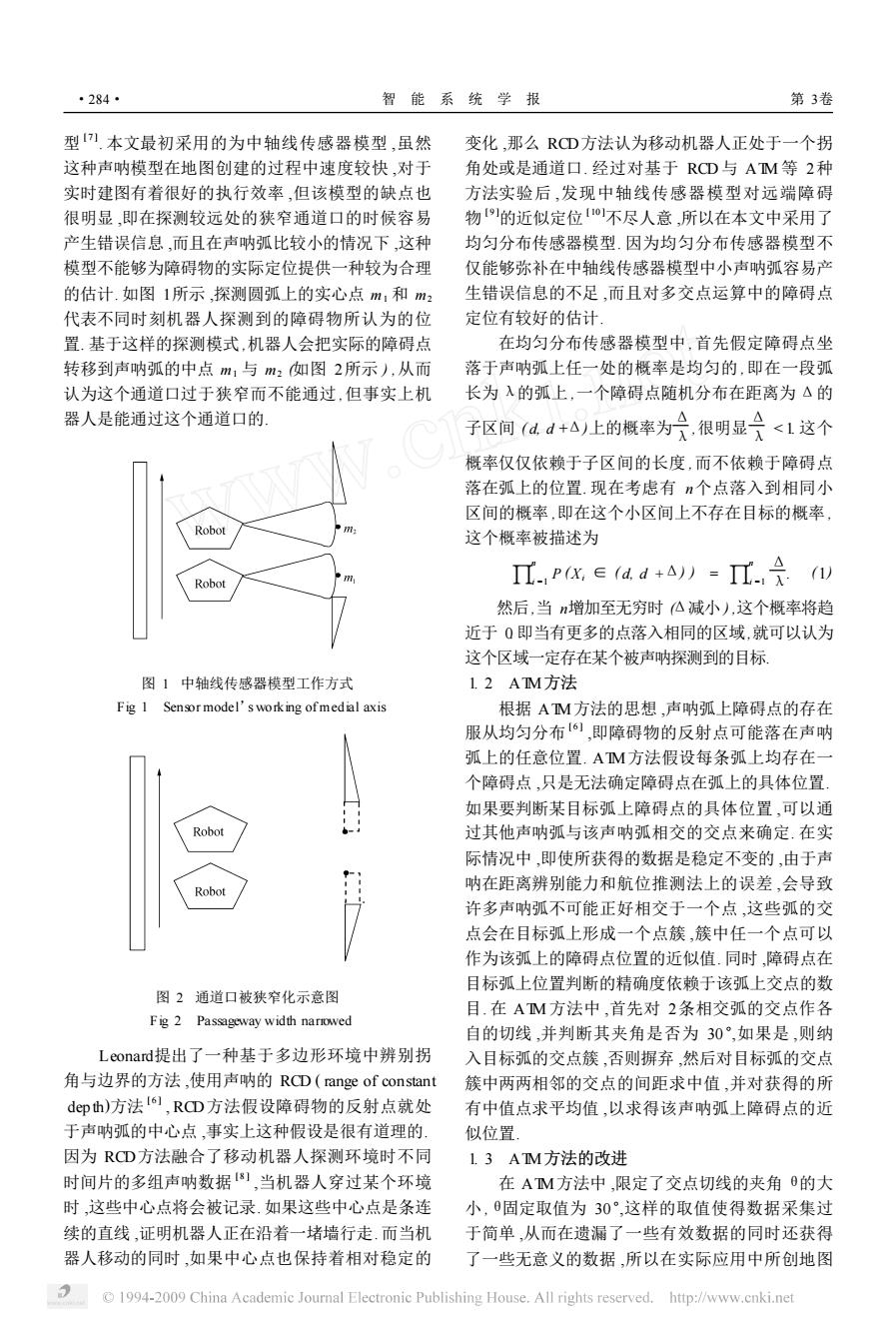
·284· 智能系统学报 第3卷 型).本文最初采用的为中轴线传感器模型,虽然 变化,那么RCD方法认为移动机器人正处于一个拐 这种声呐模型在地图创建的过程中速度较快,对于 角处或是通道口.经过对基于RCD与AM等2种 实时建图有着很好的执行效率,但该模型的缺点也 方法实验后,发现中轴线传感器模型对远端障碍 很明显,即在探测较远处的狭窄通道口的时候容易 物的近似定位不尽人意,所以在本文中采用了 产生错误信息,而且在声呐弧比较小的情况下,这种 均匀分布传感器模型.因为均匀分布传感器模型不 模型不能够为障碍物的实际定位提供一种较为合理 仅能够弥补在中轴线传感器模型中小声呐弧容易产 的估计.如图1所示,探测圆弧上的实心点m1和m2 生错误信息的不足.而且对多交点运算中的障碍点 代表不同时刻机器人探测到的障碍物所认为的位 定位有较好的估计. 置.基于这样的探测模式,机器人会把实际的障碍点 在均匀分布传感器模型中,首先假定障碍点坐 转移到声呐弧的中点m1与m2如图2所示),从而 落于声呐弧上任一处的概率是均匀的,即在一段弧 认为这个通道口过于狭窄而不能通过,但事实上机 长为入的弧上,一个障碍点随机分布在距离为△的 器人是能通过这个通道口的, 子区间(dd+4)上的概率为片,很明显会<1这个 概率仅仅依赖于子区间的长度,而不依赖于障碍点 落在弧上的位置.现在考虑有n个点落入到相同小 区间的概率,即在这个小区间上不存在目标的概率, Robot 这个概率被描述为 .) Robot 几px∈ad+a)=I. 然后,当n增加至无穷时公减小),这个概率将趋 近于0即当有更多的点落入相同的区域,就可以认为 这个区域一定存在某个被声呐探测到的目标】 图1中轴线传感器模型工作方式 12AM方法 Fig 1 Sensor model's working ofmedial axis 根据AM方法的思想,声呐弧上障碍点的存在 服从均匀分布1,即障碍物的反射点可能落在声呐 弧上的任意位置.AM方法假设每条弧上均存在一 个障碍点,只是无法确定障碍点在弧上的具体位置」 如果要判断某目标弧上障碍点的具体位置,可以通 Robot 过其他声呐弧与该声呐弧相交的交点来确定.在实 际情况中,即使所获得的数据是稳定不变的,由于声 Robot 呐在距离辨别能力和航位推测法上的误差,会导致 许多声呐弧不可能正好相交于一个点,这些弧的交 点会在目标弧上形成一个点簇,簇中任一个点可以 作为该弧上的障碍点位置的近似值.同时,障碍点在 目标弧上位置判断的精确度依赖于该弧上交点的数 图2通道口被狭窄化示意图 目.在AM方法中,首先对2条相交弧的交点作各 Fig 2 Passageway width narowed 自的切线,并判断其夹角是否为30°,如果是,则纳 Leonard提出了一种基于多边形环境中辨别拐 入目标弧的交点簇,否则摒弃,然后对目标弧的交点 角与边界的方法,使用声呐的RCD(range of constant 簇中两两相邻的交点的间距求中值,并对获得的所 deph)方法I6,RC①方法假设障碍物的反射点就处 有中值点求平均值,以求得该声呐弧上障碍点的近 于声呐弧的中心点,事实上这种假设是很有道理的. 似位置 因为RCD方法融合了移动机器人探测环境时不同 1.3AM方法的改进 时间片的多组声呐数据),当机器人穿过某个环境 在AM方法中,限定了交点切线的夹角0的大 时,这些中心点将会被记录.如果这些中心点是条连 小,固定取值为30°,这样的取值使得数据采集过 续的直线,证明机器人正在沿着一堵墙行走.而当机 于简单,从而在遗漏了一些有效数据的同时还获得 器人移动的同时,如果中心点也保持着相对稳定的 了一些无意义的数据,所以在实际应用中所创地图 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net型 [ 7 ] . 本文最初采用的为中轴线传感器模型 ,虽然 这种声呐模型在地图创建的过程中速度较快 ,对于 实时建图有着很好的执行效率 ,但该模型的缺点也 很明显 ,即在探测较远处的狭窄通道口的时候容易 产生错误信息 ,而且在声呐弧比较小的情况下 ,这种 模型不能够为障碍物的实际定位提供一种较为合理 的估计. 如图 1所示 ,探测圆弧上的实心点 m1 和 m2 代表不同时刻机器人探测到的障碍物所认为的位 置. 基于这样的探测模式 ,机器人会把实际的障碍点 转移到声呐弧的中点 m1 与 m2 (如图 2所示 ) ,从而 认为这个通道口过于狭窄而不能通过 ,但事实上机 器人是能通过这个通道口的. 图 1 中轴线传感器模型工作方式 Fig. 1 Sensor model’s working of medial axis 图 2 通道口被狭窄化示意图 Fig. 2 Passageway width narrowed Leonard提出了一种基于多边形环境中辨别拐 角与边界的方法 ,使用声呐的 RCD ( range of constant dep th)方法 [ 6 ] , RCD方法假设障碍物的反射点就处 于声呐弧的中心点 ,事实上这种假设是很有道理的. 因为 RCD方法融合了移动机器人探测环境时不同 时间片的多组声呐数据 [ 8 ] ,当机器人穿过某个环境 时 ,这些中心点将会被记录. 如果这些中心点是条连 续的直线 ,证明机器人正在沿着一堵墙行走. 而当机 器人移动的同时 ,如果中心点也保持着相对稳定的 变化 ,那么 RCD方法认为移动机器人正处于一个拐 角处或是通道口. 经过对基于 RCD与 ATM 等 2种 方法实验后 ,发现中轴线传感器模型对远端障碍 物 [ 9 ]的近似定位 [ 10 ]不尽人意 ,所以在本文中采用了 均匀分布传感器模型. 因为均匀分布传感器模型不 仅能够弥补在中轴线传感器模型中小声呐弧容易产 生错误信息的不足 ,而且对多交点运算中的障碍点 定位有较好的估计. 在均匀分布传感器模型中 ,首先假定障碍点坐 落于声呐弧上任一处的概率是均匀的 ,即在一段弧 长为 λ的弧上 ,一个障碍点随机分布在距离为 Δ的 子区间 ( d, d +Δ)上的概率为 Δ λ ,很明显 Δ λ < 1. 这个 概率仅仅依赖于子区间的长度 ,而不依赖于障碍点 落在弧上的位置. 现在考虑有 n个点落入到相同小 区间的概率 ,即在这个小区间上不存在目标的概率 , 这个概率被描述为 ∏ n i =1 P (Xi ∈ ( d, d +Δ) ) = ∏ n i =1 Δ λ . (1) 然后,当 n增加至无穷时 (Δ减小 ) ,这个概率将趋 近于 0. 即当有更多的点落入相同的区域,就可以认为 这个区域一定存在某个被声呐探测到的目标. 1. 2 ATM方法 根据 ATM方法的思想 ,声呐弧上障碍点的存在 服从均匀分布 [ 6 ] ,即障碍物的反射点可能落在声呐 弧上的任意位置. ATM方法假设每条弧上均存在一 个障碍点 ,只是无法确定障碍点在弧上的具体位置. 如果要判断某目标弧上障碍点的具体位置 ,可以通 过其他声呐弧与该声呐弧相交的交点来确定. 在实 际情况中 ,即使所获得的数据是稳定不变的 ,由于声 呐在距离辨别能力和航位推测法上的误差 ,会导致 许多声呐弧不可能正好相交于一个点 ,这些弧的交 点会在目标弧上形成一个点簇 ,簇中任一个点可以 作为该弧上的障碍点位置的近似值. 同时 ,障碍点在 目标弧上位置判断的精确度依赖于该弧上交点的数 目. 在 ATM方法中 ,首先对 2条相交弧的交点作各 自的切线 ,并判断其夹角是否为 30°,如果是 ,则纳 入目标弧的交点簇 ,否则摒弃 ,然后对目标弧的交点 簇中两两相邻的交点的间距求中值 ,并对获得的所 有中值点求平均值 ,以求得该声呐弧上障碍点的近 似位置. 1. 3 ATM方法的改进 在 ATM方法中 ,限定了交点切线的夹角 θ的大 小 ,θ固定取值为 30°,这样的取值使得数据采集过 于简单 ,从而在遗漏了一些有效数据的同时还获得 了一些无意义的数据 ,所以在实际应用中所创地图 ·284· 智 能 系 统 学 报 第 3卷