正在加载图片...
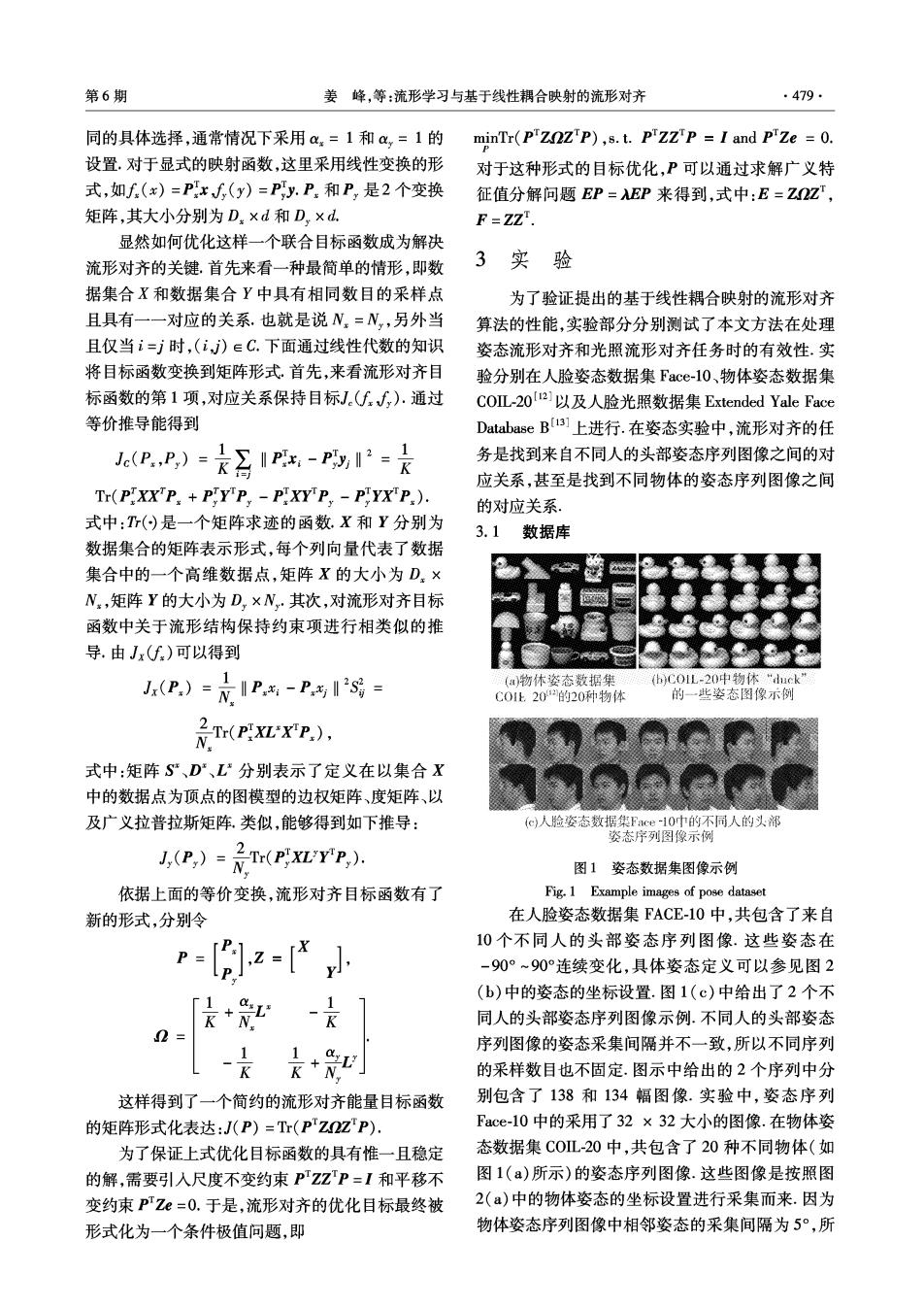
第6期 姜峰,等:流形学习与基于线性耦合映射的流形对齐 ·479… 同的具体选择,通常情况下采用a=1和&,=1的 minTr(PZOZ'P),s.t.PZZP =I and pTZe =0. 设置.对于显式的映射函数,这里采用线性变换的形 对于这种形式的目标优化,P可以通过求解广义特 式,如∫(x)=Px(y)=Py.P和P,是2个变换 征值分解问题EP=EP来得到,式中:E=Z2Z, 矩阵,其大小分别为D×d和D.×d F=ZZ". 显然如何优化这样一个联合目标函数成为解决 流形对齐的关键.首先来看一种最简单的情形,即数 3实验 据集合X和数据集合Y中具有相同数目的采样点 为了验证提出的基于线性耦合映射的流形对齐 且具有一一对应的关系.也就是说N=N。,另外当 算法的性能,实验部分分别测试了本文方法在处理 且仅当i=j时,(i,)∈C.下面通过线性代数的知识 姿态流形对齐和光照流形对齐任务时的有效性.实 将目标函数变换到矩阵形式.首先,来看流形对齐目 验分别在人脸姿态数据集Face-10、物体姿态数据集 标函数的第1项,对应关系保持目标J(ff).通过 COL-20I2以及人脸光照数据集Extended Yale Face 等价推导能得到 Database B13]上进行.在姿态实验中,流形对齐的任 (PP)=为1P-PI2=卡 务是找到来自不同人的头部姿态序列图像之间的对 应关系,甚至是找到不同物体的姿态序列图像之间 Tr(P:XX'P:+P'Y'P,-PIXYP,PTYX P). 的对应关系 式中:T()是一个矩阵求迹的函数X和Y分别为 3.1数据库 数据集合的矩阵表示形式,每个列向量代表了数据 集合中的一个高维数据点,矩阵X的大小为D.× N,矩阵Y的大小为D,×N.其次,对流形对齐目标 函数中关于流形结构保持约束项进行相类似的推 导.由Jx(f)可以得到 J(P)=N.IP-Ps (a)物休姿态数据集 hC01L-20中物体“uck” C01上.20的20种物体 的一些姿态图像示例 是(Pxp. 式中:矩阵S、D、L分别表示了定义在以集合X 中的数据点为顶点的图模型的边权矩阵、度矩阵、以 及广义拉普拉斯矩阵.类似,能够得到如下推导: (C)人脸姿态数据集Fe10巾的不同人的头部 P)=(Prr. 姿态序列图像示例 图1姿态数据集图像示例 依据上面的等价变换,流形对齐目标函数有了 Fig.1 Example images of pose dataset 新的形式,分别令 在人脸姿态数据集FACE-10中,共包含了来自 10个不同人的头部姿态序列图像.这些姿态在 P= -90°~90°连续变化,具体姿态定义可以参见图2 (b)中的姿态的坐标设置.图1(c)中给出了2个不 *N. 同人的头部姿态序列图像示例.不同人的头部姿态 1 I 序列图像的姿态采集间隔并不一致,所以不同序列 N 的采样数目也不固定.图示中给出的2个序列中分 这样得到了一个简约的流形对齐能量目标函数 别包含了138和134幅图像.实验中,姿态序列 的矩阵形式化表达:J(P)=Tr(PZ2ZP). Face-10中的采用了32×32大小的图像.在物体姿 为了保证上式优化目标函数的具有惟一且稳定 态数据集C0L-20中,共包含了20种不同物体(如 的解,需要引入尺度不变约束PZZP=I和平移不 图1(a)所示)的姿态序列图像.这些图像是按照图 变约束PZe=0.于是,流形对齐的优化目标最终被 2(a)中的物体姿态的坐标设置进行采集而来.因为 形式化为一个条件极值问题,即 物体姿态序列图像中相邻姿态的采集间隔为5°,所