正在加载图片...
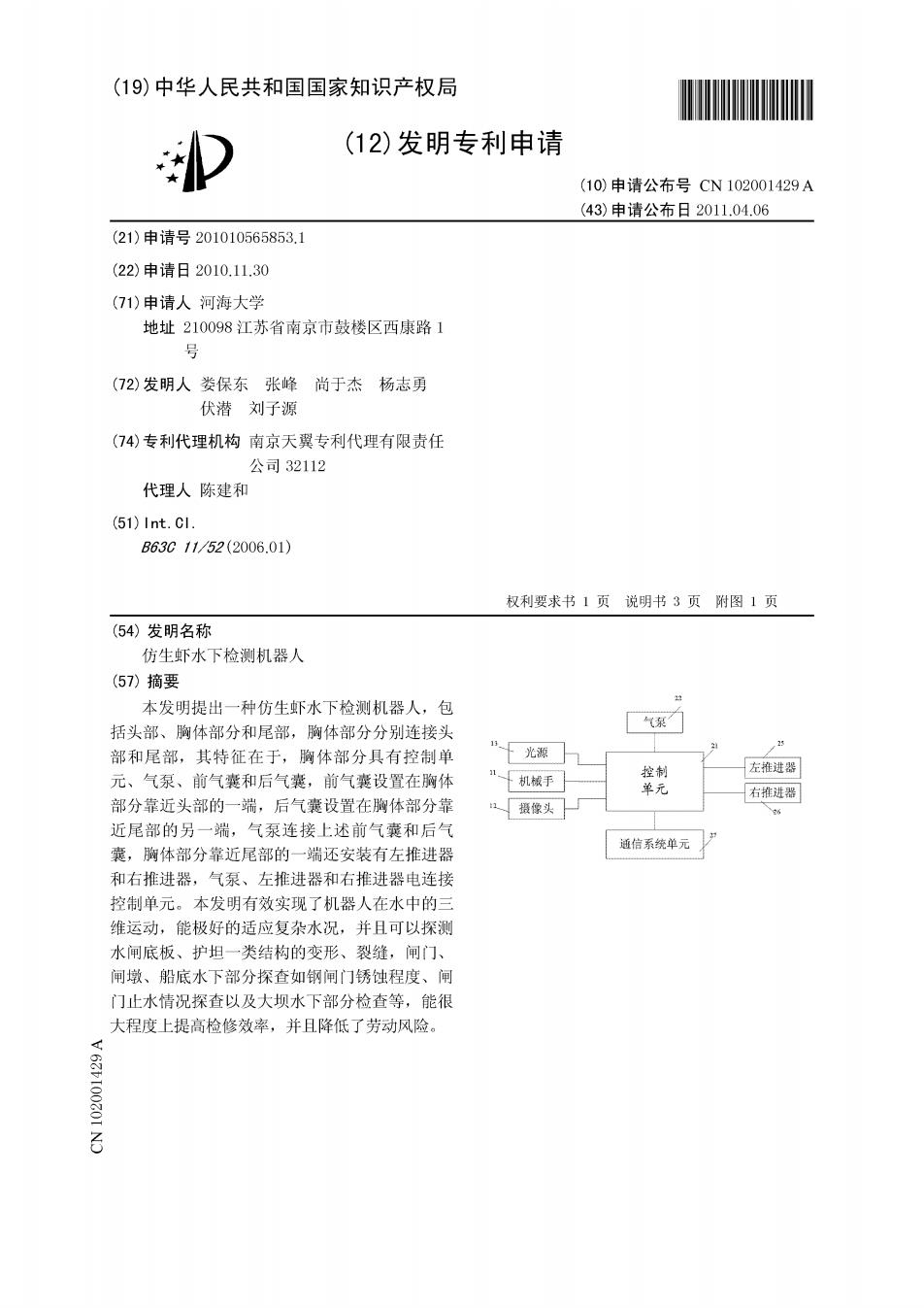
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN102001429A (43)申请公布日2011.04.06 (21)申请号201010565853.1 (22)申请日2010.11.30 (71)申请人河海大学 地址210098江苏省南京市鼓楼区西康路1 号 (72)发明人娄保东张峰尚于杰杨志勇 伏潜刘子源 (74)专利代理机构南京天翼专利代理有限责任 公司32112 代理人陈建和 (51)1nt.cl. B63011/52(2006.01) 权利要求书1页说明书3页附图1页 (54)发明名称 仿生虾水下检测机器人 (57)摘要 本发明提出一种仿生虾水下检测机器人,包 气泵 括头部、胸体部分和尾部,胸体部分分别连接头 13 2 部和尾部,其特征在于,胸体部分具有控制单 光源 控制 左推进器 元、气泵、前气囊和后气囊,前气囊设置在胸体 机械手 单元 右推进器 部分靠近头部的一端,后气囊设置在胸体部分靠 摄像头 6 近尾部的另一端,气泵连接上述前气囊和后气 通信系统单元 囊,胸体部分靠近尾部的一端还安装有左推进器 和右推进器,气泵、左推进器和右推进器电连接 控制单元。本发明有效实现了机器人在水中的三 维运动,能极好的适应复杂水况,并且可以探测 水闸底板、护坦一类结构的变形、裂缝,闸门、 闸墩、船底水下部分探查如钢闸门锈蚀程度、闸 门止水情况探查以及大坝水下部分检查等,能很 大程度上提高检修效率,并且降低了劳动风险。 0090 名