正在加载图片...
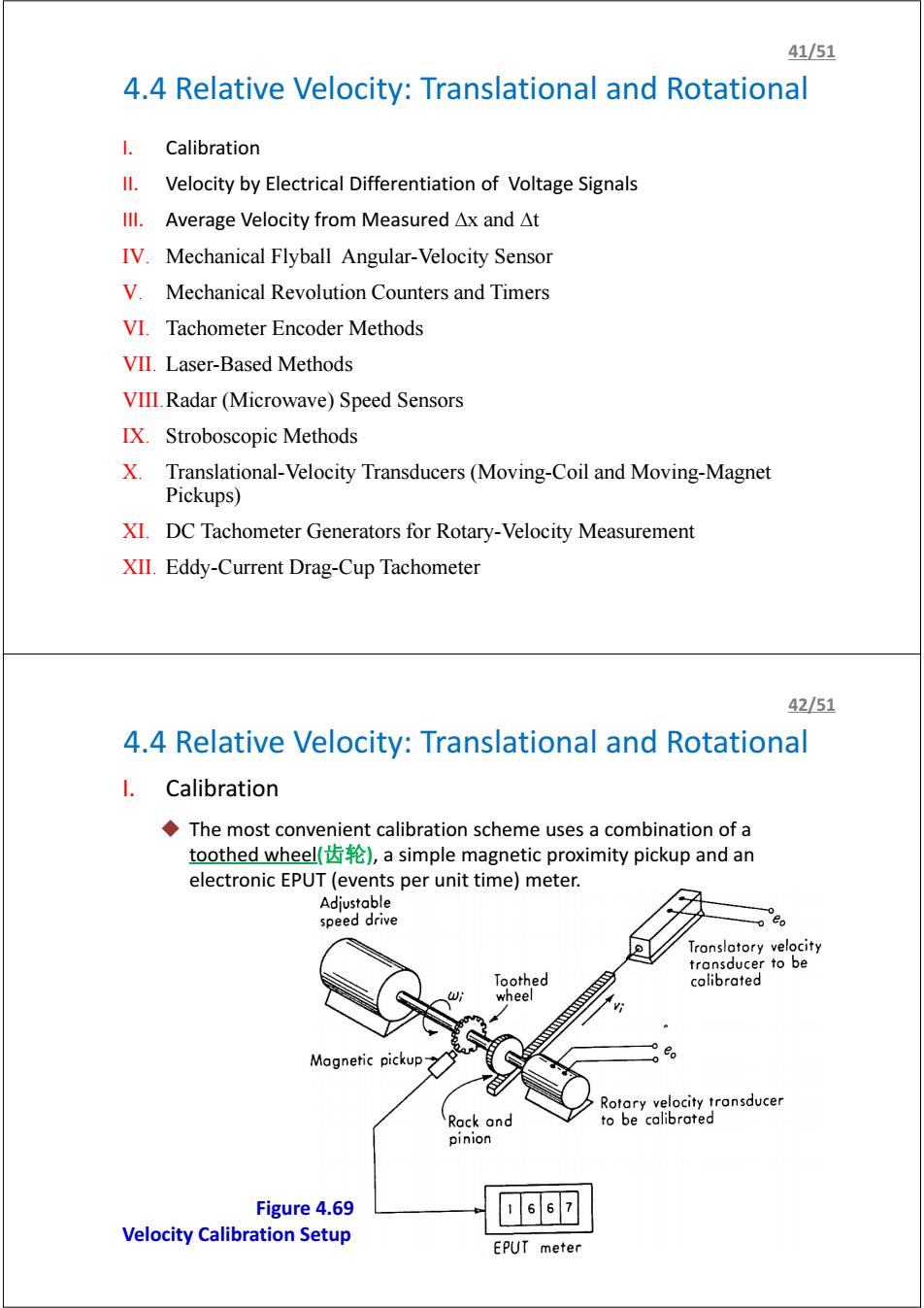
4151 4.4 Relative Velocity:Translational and Rotational I.Calibration ll.Velocity by Electrical Differentiation of Voltage Signals Ill.Average Velocity from Measured△xand△t IV.Mechanical Flyball Angular-Velocity Sensor V.Mechanical Revolution Counters and Timers VI.Tachometer Encoder Methods VII.Laser-Based Methods VIII.Radar(Microwave)Speed Sensors IX.Stroboscopic Methods X.Translational-Velocity Transducers (Moving-Coil and Moving-Magnet Pickups) XI.DC Tachometer Generators for Rotary-Velocity Measurement XII.Eddy-Current Drag-Cup Tachometer 42/51 4.4 Relative Velocity:Translational and Rotational I.Calibration The most convenient calibration scheme uses a combination of a toothed wheel(齿轮),a simple magnetic proximity pickup and an electronic EPUT (events per unit time)meter. Adjustable speed drive Tronslotory velocity transducer to be Toothed colibrated wheel Magnetic pickup Rotary velocity transducer Rack and to be calibrated pinion Figure 4.69 Velocity Calibration Setup EPUT meter4.4 Relative Velocity: Translational and Rotational I. Calibration II. Velocity by Electrical Differentiation of Voltage Signals III. Average Velocity from Measured ∆x and ∆t IV. Mechanical Flyball Angular-Velocity Sensor V. Mechanical Revolution Counters and Timers VI. Tachometer Encoder Methods VII. Laser-Based Methods VIII.Radar (Microwave) Speed Sensors IX. Stroboscopic Methods X. Translational-Velocity Transducers (Moving-Coil and Moving-Magnet Pickups) XI. DC Tachometer Generators for Rotary-Velocity Measurement XII. Eddy-Current Drag-Cup Tachometer 41/51 4.4 Relative Velocity: Translational and Rotational I. Calibration The most convenient calibration scheme uses a combination of a toothed wheel(齿轮), a simple magnetic proximity pickup and an electronic EPUT (events per unit time) meter. Figure 4.69 Velocity Calibration Setup 42/51