正在加载图片...
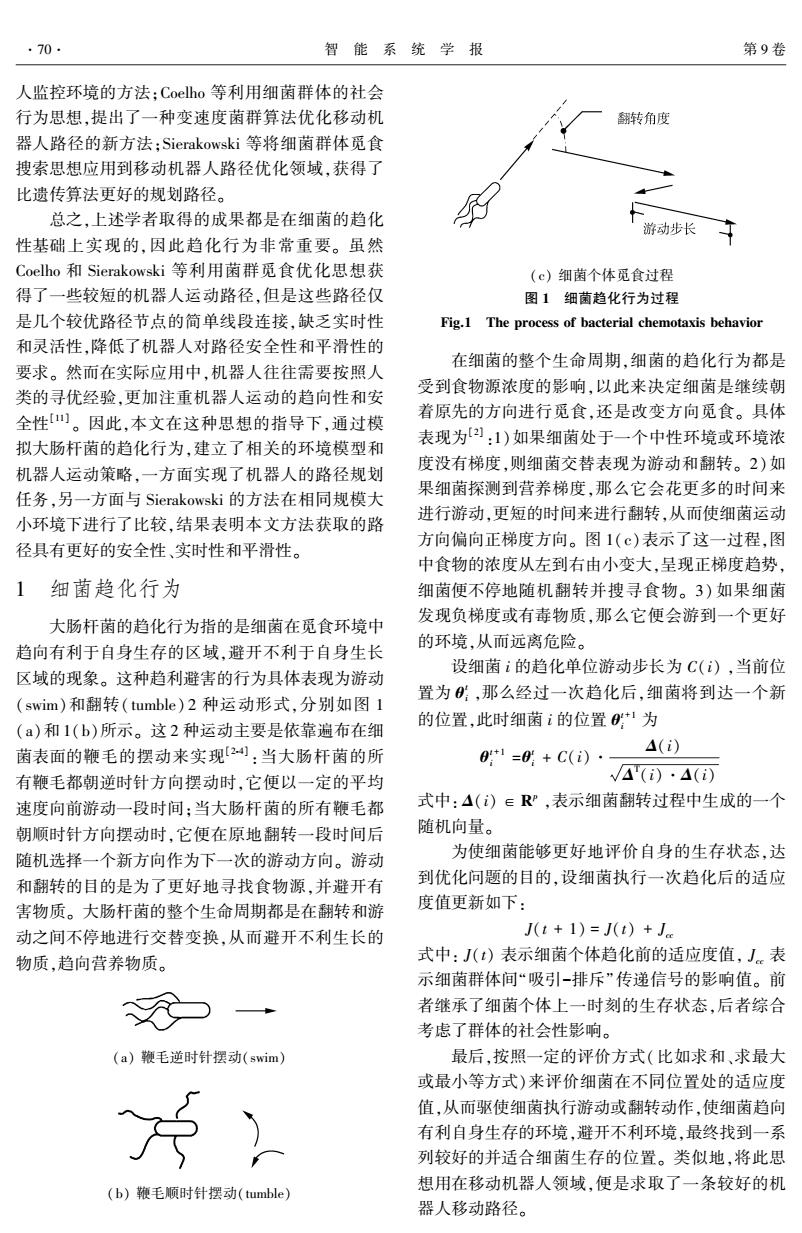
.70. 智能系统学报 第9卷 人监控环境的方法:Coelho等利用细菌群体的社会 行为思想,提出了一种变速度菌群算法优化移动机 翻转角度 器人路径的新方法;Sierakowski等将细菌群体觅食 搜索思想应用到移动机器人路径优化领域,获得了 比遗传算法更好的规划路径。 总之,上述学者取得的成果都是在细菌的趋化 游动步长 性基础上实现的,因此趋化行为非常重要。虽然 Coelho和Sierakowski等利用菌群觅食优化思想获 (c)细菌个体觅食过程 得了一些较短的机器人运动路径,但是这些路径仅 图1细菌趋化行为过程 是几个较优路径节点的简单线段连接,缺乏实时性 Fig.1 The process of bacterial chemotaxis behavior 和灵活性,降低了机器人对路径安全性和平滑性的 在细菌的整个生命周期,细菌的趋化行为都是 要求。然而在实际应用中,机器人往往需要按照人 受到食物源浓度的影响,以此来决定细菌是继续朝 类的寻优经验,更加注重机器人运动的趋向性和安 全性山。因此,本文在这种思想的指导下,通过模 着原先的方向进行觅食,还是改变方向觅食。具体 表现为[):1)如果细菌处于一个中性环境或环境浓 拟大肠杆菌的趋化行为,建立了相关的环境模型和 度没有梯度,则细菌交替表现为游动和翻转。2)如 机器人运动策略,一方面实现了机器人的路径规划 果细菌探测到营养梯度,那么它会花更多的时间来 任务,另一方面与Sierakowski的方法在相同规模大 小环境下进行了比较,结果表明本文方法获取的路 进行游动,更短的时间来进行翻转,从而使细菌运动 径具有更好的安全性、实时性和平滑性。 方向偏向正梯度方向。图1(c)表示了这一过程,图 中食物的浓度从左到右由小变大,呈现正梯度趋势, 1 细菌趋化行为 细菌便不停地随机翻转并搜寻食物。3)如果细菌 发现负梯度或有毒物质,那么它便会游到一个更好 大肠杆菌的趋化行为指的是细菌在觅食环境中 的环境,从而远离危险。 趋向有利于自身生存的区域,避开不利于自身生长 设细菌i的趋化单位游动步长为C(),当前位 区域的现象。这种趋利避害的行为具体表现为游动 置为,那么经过一次趋化后,细菌将到达一个新 (swim)和翻转(tumble)2种运动形式,分别如图1 的位置,此时细菌i的位置0+为 (a)和1(b)所示。这2种运动主要是依靠遍布在细 菌表面的鞭毛的摆动来实现2):当大肠杆菌的所 4(i) 0*1=0+C(i) 有鞭毛都朝逆时针方向摆动时,它便以一定的平均 W△'(i)·4(i) 速度向前游动一段时间:当大肠杆菌的所有鞭毛都 式中:△()∈R,表示细菌翻转过程中生成的一个 朝顺时针方向摆动时,它便在原地翻转一段时间后 随机向量。 随机选择一个新方向作为下一次的游动方向。游动 为使细菌能够更好地评价自身的生存状态,达 和翻转的目的是为了更好地寻找食物源,并避开有 到优化问题的目的,设细菌执行一次趋化后的适应 害物质。大肠杆菌的整个生命周期都是在翻转和游 度值更新如下: 动之间不停地进行交替变换,从而避开不利生长的 J(t+1)=J(t)+J 物质,趋向营养物质。 式中:J(t)表示细菌个体趋化前的适应度值,J表 示细菌群体间“吸引-排斥”传递信号的影响值。前 者继承了细菌个体上一时刻的生存状态,后者综合 考虑了群体的社会性影响。 (a)鞭毛逆时针摆动(swim) 最后,按照一定的评价方式(比如求和、求最大 或最小等方式)来评价细菌在不同位置处的适应度 值,从而驱使细菌执行游动或翻转动作,使细菌趋向 有利自身生存的环境,避开不利环境,最终找到一系 列较好的并适合细菌生存的位置。类似地,将此思 想用在移动机器人领域,便是求取了一条较好的机 (b)鞭毛顺时针摆动(tumble) 器人移动路径。人监控环境的方法;Coelho 等利用细菌群体的社会 行为思想,提出了一种变速度菌群算法优化移动机 器人路径的新方法;Sierakowski 等将细菌群体觅食 搜索思想应用到移动机器人路径优化领域,获得了 比遗传算法更好的规划路径。 总之,上述学者取得的成果都是在细菌的趋化 性基础上实现的,因此趋化行为非常重要。 虽然 Coelho 和 Sierakowski 等利用菌群觅食优化思想获 得了一些较短的机器人运动路径,但是这些路径仅 是几个较优路径节点的简单线段连接,缺乏实时性 和灵活性,降低了机器人对路径安全性和平滑性的 要求。 然而在实际应用中,机器人往往需要按照人 类的寻优经验,更加注重机器人运动的趋向性和安 全性[11] 。 因此,本文在这种思想的指导下,通过模 拟大肠杆菌的趋化行为,建立了相关的环境模型和 机器人运动策略,一方面实现了机器人的路径规划 任务,另一方面与 Sierakowski 的方法在相同规模大 小环境下进行了比较,结果表明本文方法获取的路 径具有更好的安全性、实时性和平滑性。 1 细菌趋化行为 大肠杆菌的趋化行为指的是细菌在觅食环境中 趋向有利于自身生存的区域,避开不利于自身生长 区域的现象。 这种趋利避害的行为具体表现为游动 (swim)和翻转( tumble) 2 种运动形式,分别如图 1 (a)和 1(b)所示。 这 2 种运动主要是依靠遍布在细 菌表面的鞭毛的摆动来实现[2⁃4] :当大肠杆菌的所 有鞭毛都朝逆时针方向摆动时,它便以一定的平均 速度向前游动一段时间;当大肠杆菌的所有鞭毛都 朝顺时针方向摆动时,它便在原地翻转一段时间后 随机选择一个新方向作为下一次的游动方向。 游动 和翻转的目的是为了更好地寻找食物源,并避开有 害物质。 大肠杆菌的整个生命周期都是在翻转和游 动之间不停地进行交替变换,从而避开不利生长的 物质,趋向营养物质。 (a) 鞭毛逆时针摆动(swim) (b) 鞭毛顺时针摆动(tumble) (c) 细菌个体觅食过程 图 1 细菌趋化行为过程 Fig.1 The process of bacterial chemotaxis behavior 在细菌的整个生命周期,细菌的趋化行为都是 受到食物源浓度的影响,以此来决定细菌是继续朝 着原先的方向进行觅食,还是改变方向觅食。 具体 表现为[2] :1)如果细菌处于一个中性环境或环境浓 度没有梯度,则细菌交替表现为游动和翻转。 2)如 果细菌探测到营养梯度,那么它会花更多的时间来 进行游动,更短的时间来进行翻转,从而使细菌运动 方向偏向正梯度方向。 图 1(c)表示了这一过程,图 中食物的浓度从左到右由小变大,呈现正梯度趋势, 细菌便不停地随机翻转并搜寻食物。 3) 如果细菌 发现负梯度或有毒物质,那么它便会游到一个更好 的环境,从而远离危险。 设细菌 i 的趋化单位游动步长为 C(i) ,当前位 置为 θ t i ,那么经过一次趋化后,细菌将到达一个新 的位置,此时细菌 i 的位置 θ t+1 i 为 θ t+1 i =θ t i + C(i)· Δ(i) Δ T (i)·Δ(i) 式中: Δ(i) ∈ R p ,表示细菌翻转过程中生成的一个 随机向量。 为使细菌能够更好地评价自身的生存状态,达 到优化问题的目的,设细菌执行一次趋化后的适应 度值更新如下: J(t + 1) = J(t) + Jcc 式中: J(t) 表示细菌个体趋化前的适应度值, Jcc 表 示细菌群体间“吸引-排斥”传递信号的影响值。 前 者继承了细菌个体上一时刻的生存状态,后者综合 考虑了群体的社会性影响。 最后,按照一定的评价方式(比如求和、求最大 或最小等方式)来评价细菌在不同位置处的适应度 值,从而驱使细菌执行游动或翻转动作,使细菌趋向 有利自身生存的环境,避开不利环境,最终找到一系 列较好的并适合细菌生存的位置。 类似地,将此思 想用在移动机器人领域,便是求取了一条较好的机 器人移动路径。 ·70· 智 能 系 统 学 报 第 9 卷