正在加载图片...
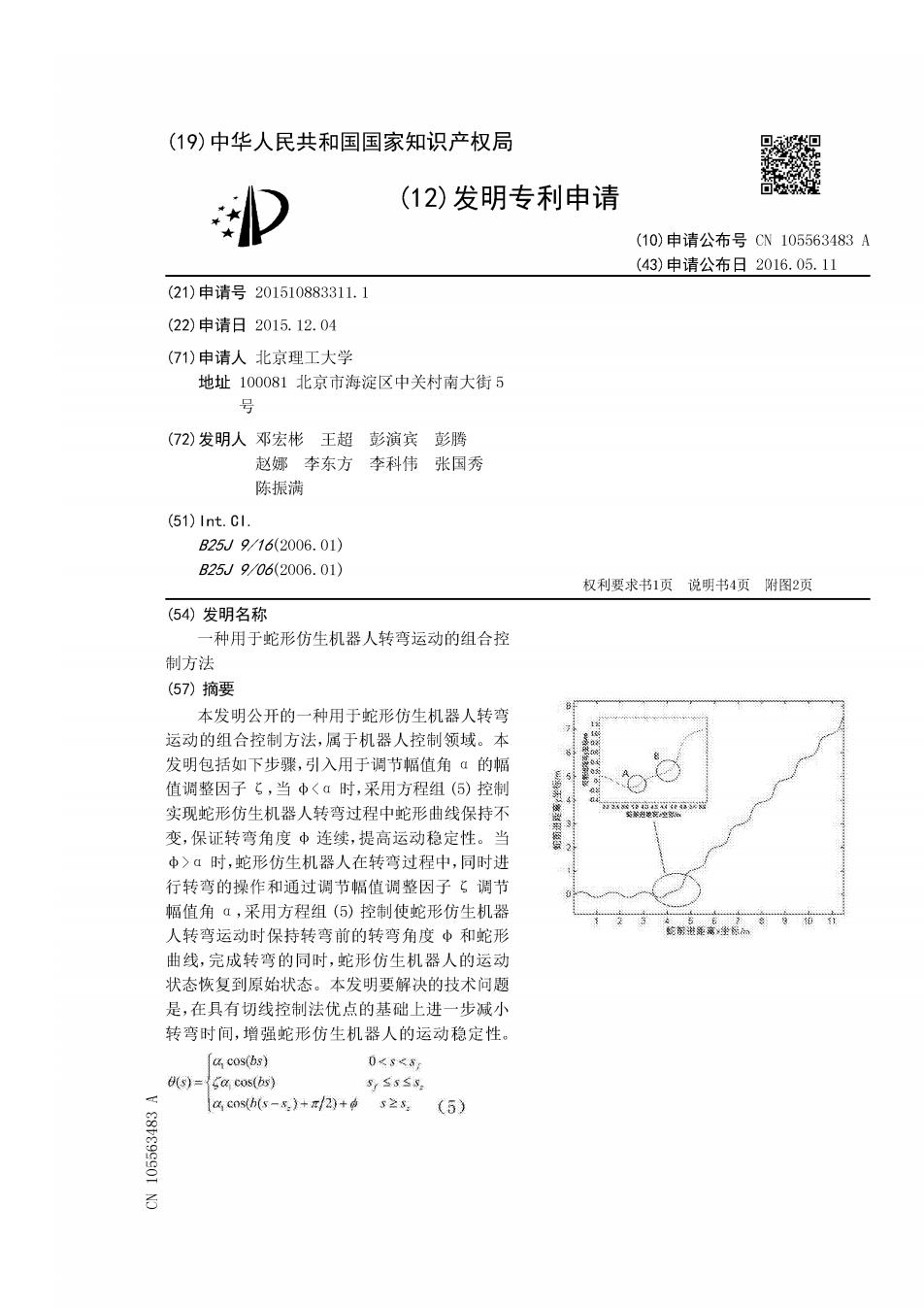
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN105563483A (43)申请公布日2016.05.11 (21)申请号201510883311.1 (22)申请日2015.12.04 (71)申请人北京理工大学 地址100081北京市海淀区中关村南大街5 % (72)发明人邓宏彬王超彭演宾彭腾 赵娜李东方李科伟张国秀 陈振满 (51)1nt.Cl. B25J9/16(2006.01) B25J9062006.01) 权利要求书1页说明书4页附图2页 (54)发明名称 一种用于蛇形仿生机器人转弯运动的组合控 制方法 (57)摘要 本发明公开的一种用于蛇形仿生机器人转弯 运动的组合控制方法,属于机器人控制领域。本 发明包括如下步骤,引入用于调节幅值角α的幅 值调整因子℃,当中<α时,采用方程组(⑤)控制 实现蛇形仿生机器人转弯过程中蛇形曲线保持不 变,保证转弯角度中连续,提高运动稳定性。当 中>α时,蛇形仿生机器人在转弯过程中,同时进 行转弯的操作和通过调节幅值调整因子调节 幅值角α,采用方程组(⑤)控制使蛇形仿生机器 人转弯运动时保持转弯前的转弯角度中和蛇形 曲线,完成转弯的同时,蛇形仿生机器人的运动 状态恢复到原始状态。本发明要解决的技术问题 是,在具有切线控制法优点的基础上进一步减小 转弯时间,增强蛇形仿生机器人的运动稳定性。 么cos(bs) 0s2 (s)= ga cos(hs》 y≤s≤3 ac0sh-8:)+π/2+s≥s(5) 857904401 石