正在加载图片...
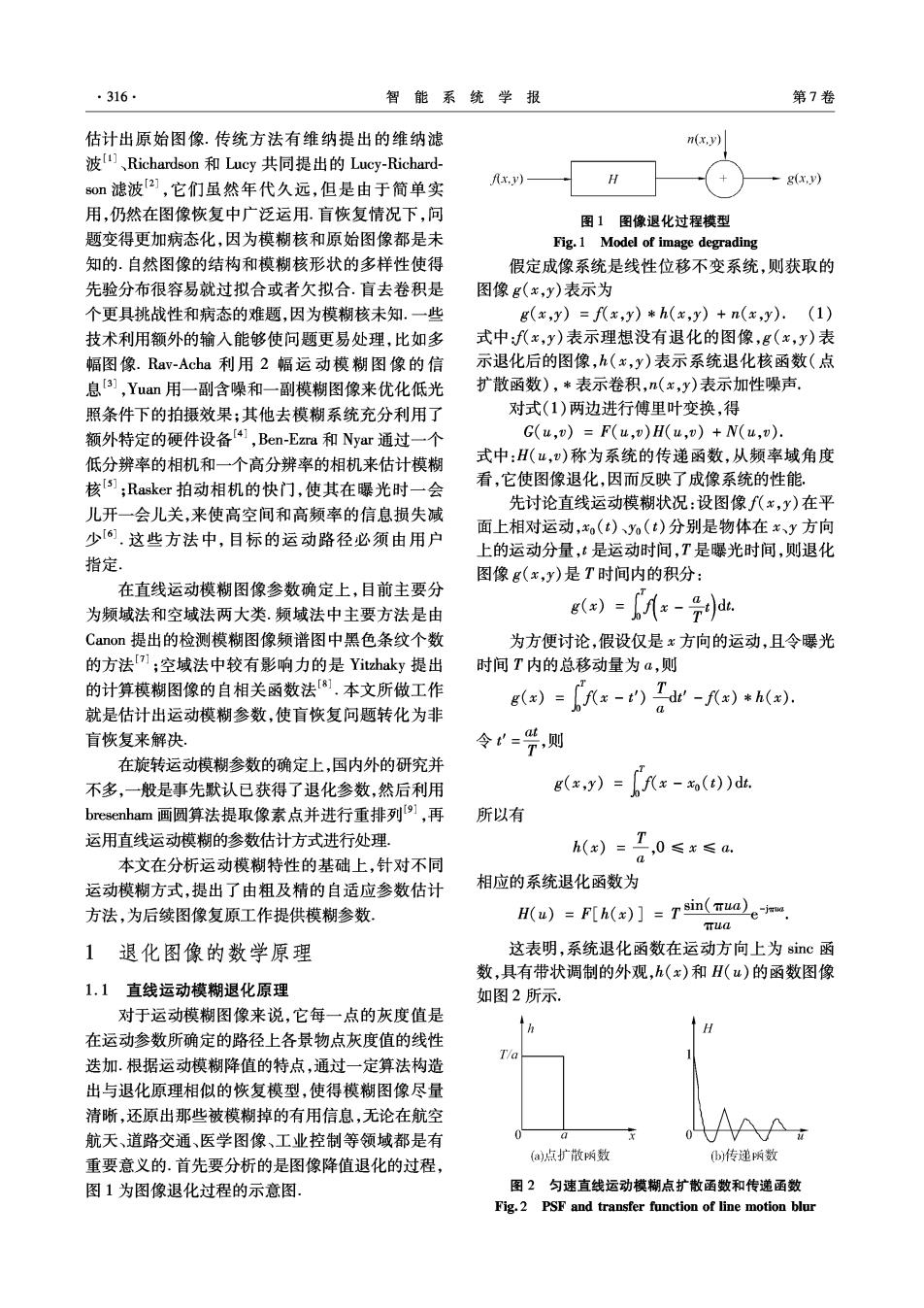
·316 智能系统学报 第7卷 估计出原始图像.传统方法有维纳提出的维纳滤 n(x.y) 波、Richardson和Lucy共同提出的Lucy-Richard-. 0滤波21,它们虽然年代久远,但是由于简单实 fx.y) g(x.y) 用,仍然在图像恢复中广泛运用.盲恢复情况下,问 图1图像退化过程模型 题变得更加病态化,因为模糊核和原始图像都是未 Fig.1 Model of image degrading 知的.自然图像的结构和模糊核形状的多样性使得 假定成像系统是线性位移不变系统,则获取的 先验分布很容易就过拟合或者欠拟合.盲去卷积是 图像g(x,y)表示为 个更具挑战性和病态的难题,因为模糊核未知。一些 g(x,y)=f(x,y)*h(x,y)+n(x,y).(1) 技术利用额外的输入能够使问题更易处理,比如多 式中:f(x,y)表示理想没有退化的图像,g(x,y)表 幅图像.Rav-Acha利用2幅运动模糊图像的信 示退化后的图像,h(x,y)表示系统退化核函数(点 息3),Yuan用一副含噪和一副模糊图像来优化低光 扩散函数),*表示卷积,n(x,y)表示加性噪声. 照条件下的拍摄效果;其他去模糊系统充分利用了 对式(1)两边进行傅里叶变换,得 额外特定的硬件设备4,Ben-Ezra和Nyar通过一个 G(,v)=F(u,D)H(u,D)+N(u,). 低分辨率的相机和一个高分辨率的相机来估计模糊 式中:H(u,)称为系统的传递函数,从频率域角度 核];Rasker拍动相机的快门,使其在曝光时一会 看,它使图像退化,因而反映了成像系统的性能。 儿开一会儿关,来使高空间和高频率的信息损失减 先讨论直线运动模糊状况:设图像f(x,y)在平 少6.这些方法中,目标的运动路径必须由用户 面上相对运动,(t)、y(t)分别是物体在x、y方向 上的运动分量,t是运动时间,T是曝光时间,则退化 指定 图像g(x,y)是T时间内的积分: 在直线运动模糊图像参数确定上,目前主要分 为频域法和空域法两大类.频域法中主要方法是由 g)=- Canon提出的检测模糊图像频谱图中黑色条纹个数 为方便讨论,假设仅是x方向的运动,且令曝光 的方法;空域法中较有影响力的是Yitzhaky提出 时间T内的总移动量为a,则 的计算模糊图像的自相关函数法[].本文所做工作 就是估计出运动模糊参数,使盲恢复问题转化为非 g()=x-t0比-fe)*h(. 盲恢复来解决。 令=学则 在旋转运动模糊参数的确定上,国内外的研究并 不多,一般是事先默认已获得了退化参数,然后利用 g(x,y)=fx-(t)d bresenham画圆算法提取像素点并进行重排列91,再 所以有 运用直线运动模糊的参数估计方式进行处理, h(x)=I,0≤x≤a. 本文在分析运动模糊特性的基础上,针对不同 0 运动模糊方式,提出了由粗及精的自适应参数估计 相应的系统退化函数为 方法,为后续图像复原工作提供模糊参数. H(u)=F[h(x)]=Tsin(mua)ei mua 1退化图像的数学原理 这表明,系统退化函数在运动方向上为sinc函 数,具有带状调制的外观,h(x)和H(u)的函数图像 1.1直线运动模糊退化原理 如图2所示. 对于运动模糊图像来说,它每一点的灰度值是 H 在运动参数所确定的路径上各景物点灰度值的线性 迭加.根据运动模糊降值的特点,通过一定算法构造 出与退化原理相似的恢复模型,使得模糊图像尽量 清晰,还原出那些被模糊掉的有用信息,无论在航空 航天、道路交通、医学图像、工业控制等领域都是有 重要意义的.首先要分析的是图像降值退化的过程, a)点扩散数 b)传递函数 图1为图像退化过程的示意图 图2匀速直线运动模糊点扩散函数和传递函数 Fig.2 PSF and transfer function of line motion blur