正在加载图片...
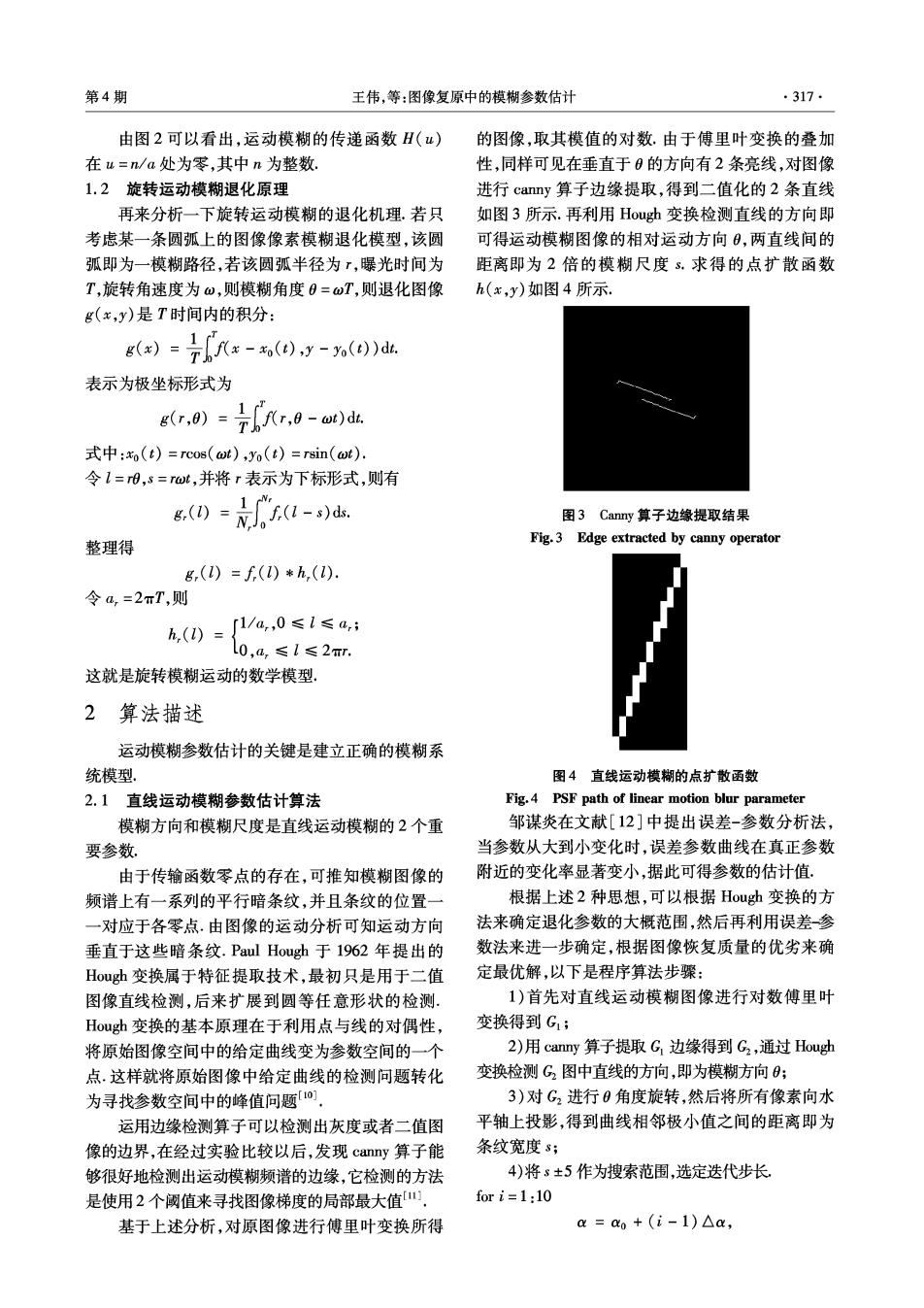
第4期 王伟,等:图像复原中的模糊参数估计 ·317· 由图2可以看出,运动模糊的传递函数H(u) 的图像,取其模值的对数.由于傅里叶变换的叠加 在u=n/a处为零,其中n为整数. 性,同样可见在垂直于0的方向有2条亮线,对图像 1.2旋转运动模糊退化原理 进行canny算子边缘提取,得到二值化的2条直线 再来分析一下旋转运动模糊的退化机理.若只 如图3所示.再利用Hough变换检测直线的方向即 考虑某一条圆弧上的图像像素模糊退化模型,该圆 可得运动模糊图像的相对运动方向θ,两直线间的 弧即为一模糊路径,若该圆弧半径为,曝光时间为 距离即为2倍的模糊尺度,求得的点扩散函数 T,旋转角速度为ω,则模糊角度0=ωT,则退化图像 h(x,y)如图4所示. g(x,y)是T时间内的积分: g到=7-(0y-%) 表示为极坐标形式为 (r,)= T6,6-w)d 式中:(t)=rcos(ot),yo(t)=rsin(wt). 令l=0,s=rwt,并将r表示为下标形式,则有 g,()= a- 图3 Canny算子边缘提取结果 整理得 Fig.3 Edge extracted by canny operator g,(L)=f(1)*h,(L): 令a,=2πT,则 h,(1))= r1/a,0≤1≤a,; l0,a,≤l≤2rm. 这就是旋转模糊运动的数学模型。 2算法描述 运动模糊参数估计的关键是建立正确的模糊系 统模型。 图4直线运动模糊的点扩散函数 2.1直线运动模糊参数估计算法 Fig.4 PSF path of linear motion blur parameter 模糊方向和模糊尺度是直线运动模糊的2个重 邹谋炎在文献[12]中提出误差-参数分析法, 要参数 当参数从大到小变化时,误差参数曲线在真正参数 由于传输函数零点的存在,可推知模糊图像的 附近的变化率显著变小,据此可得参数的估计值. 频谱上有一系列的平行暗条纹,并且条纹的位置一 根据上述2种思想,可以根据Hough变换的方 一对应于各零点.由图像的运动分析可知运动方向 法来确定退化参数的大概范围,然后再利用误差参 垂直于这些暗条纹.Paul Hough于1962年提出的 数法来进一步确定,根据图像恢复质量的优劣来确 Hough变换属于特征提取技术,最初只是用于二值 定最优解,以下是程序算法步骤: 图像直线检测,后来扩展到圆等任意形状的检测. 1)首先对直线运动模糊图像进行对数傅里叶 Hough变换的基本原理在于利用点与线的对偶性, 变换得到G; 将原始图像空间中的给定曲线变为参数空间的一个 2)用canny算子提取G,边缘得到G2,通过Hough 点.这样就将原始图像中给定曲线的检测问题转化 变换检测G2图中直线的方向,即为模糊方向0; 为寻找参数空间中的峰值问题[] 3)对G2进行0角度旋转,然后将所有像素向水 运用边缘检测算子可以检测出灰度或者二值图 平轴上投影,得到曲线相邻极小值之间的距离即为 像的边界,在经过实验比较以后,发现canny算子能 条纹宽度; 够很好地检测出运动模糊频谱的边缘,它检测的方法 4)将s±5作为搜索范围,选定迭代步长 是使用2个阈值来寻找图像梯度的局部最大值, fori=1:.10 基于上述分析,对原图像进行傅里叶变换所得 a=a0+(i-1)△a