正在加载图片...
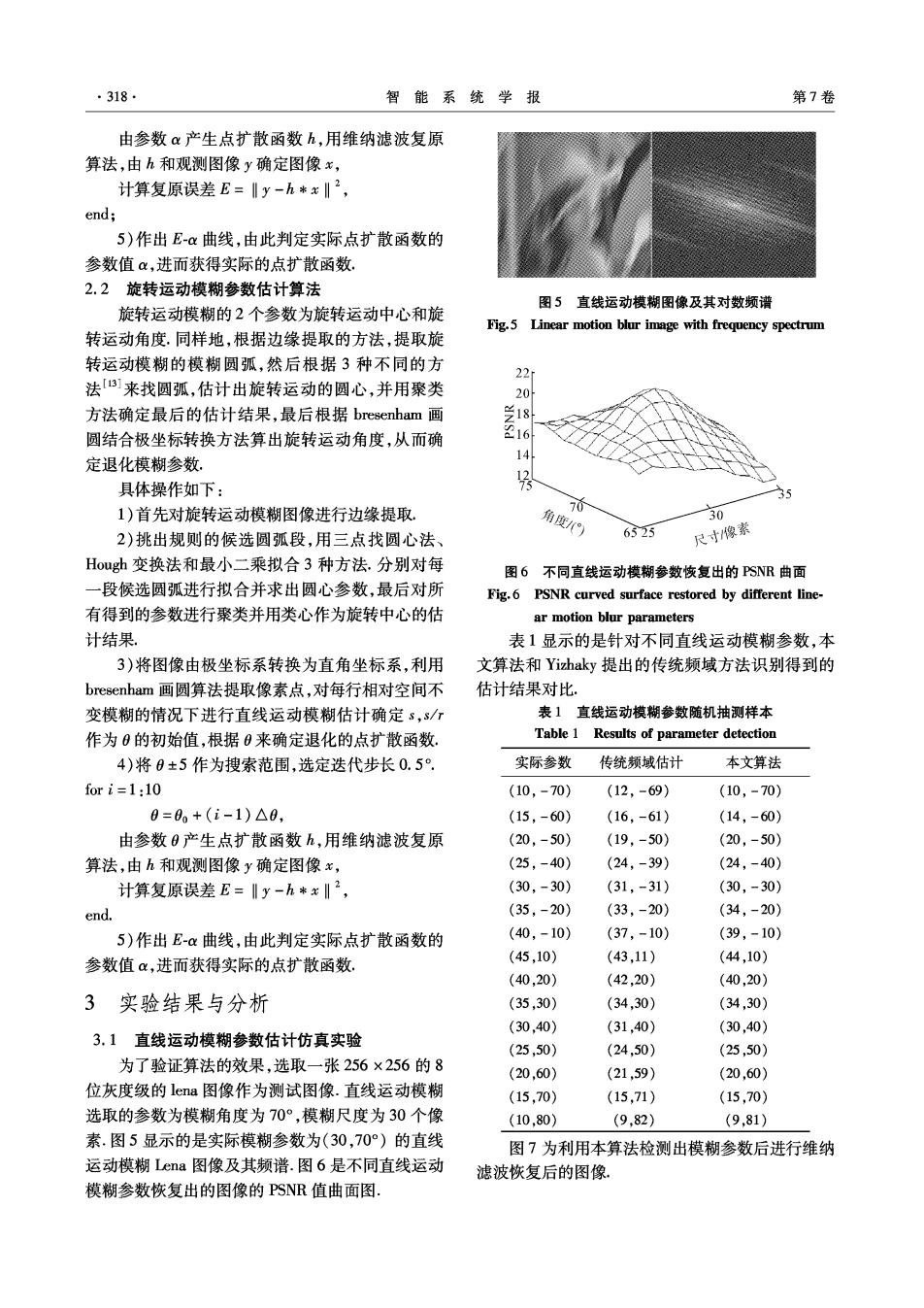
·318 智能系统学报 第7卷 由参数产生点扩散函数h,用维纳滤波复原 算法,由h和观测图像y确定图像x, 计算复原误差E=Iy-h*x‖2, end; 5)作出E-α曲线,由此判定实际点扩散函数的 参数值,进而获得实际的点扩散函数 2.2旋转运动模糊参数估计算法 图5直线运动模糊图像及其对数频谱 旋转运动模糊的2个参数为旋转运动中心和旋 Fig.5 Linear motion blur image with frequency spectrum 转运动角度.同样地,根据边缘提取的方法,提取旋 转运动模糊的模糊圆弧,然后根据3种不同的方 22 法来找圆弧,估计出旋转运动的圆心,并用聚类 20 方法确定最后的估计结果,最后根据bresenham画 兰18 圆结合极坐标转换方法算出旋转运动角度,从而确 6 14 定退化模糊参数。 具体操作如下: 35 1)首先对旋转运动模糊图像进行边缘提取, 70 角度) 30 2)挑出规则的候选圆弧段,用三点找圆心法、 6525 尺寸/像素 Hough变换法和最小二乘拟合3种方法.分别对每 图6不同直线运动模糊参数恢复出的PSNR曲面 一段候选圆弧进行拟合并求出圆心参数,最后对所 Fig.6 PSNR curved surface restored by different line- 有得到的参数进行聚类并用类心作为旋转中心的估 ar motion blur parameters 计结果 表1显示的是针对不同直线运动模糊参数,本 3)将图像由极坐标系转换为直角坐标系,利用 文算法和Yizhaky提出的传统频域方法识别得到的 bresenham画圆算法提取像素点,对每行相对空间不 估计结果对此 变模糊的情况下进行直线运动模糊估计确定s,sr 表1直线运动模糊参数随机抽测样本 作为0的初始值,根据0来确定退化的点扩散函数. Table 1 Results of parameter detection 4)将0±5作为搜索范围,选定迭代步长0.5 实际参数 传统频域估计 本文算法 for i=1:10 (10,-70) (12,-69) (10,-70) 0=00+(i-1)△0, (15,-60) (16,-61) (14,-60) 由参数0产生点扩散函数h,用维纳滤波复原 (20,-50) (19,-50) (20,-50) 算法,由h和观测图像y确定图像x, (25,-40) (24,-39) (24,-40) 计算复原误差E=‖y-h*x‖2, (30,-30) (31,-31) (30,-30) end. (35,-20) (33,-20) (34,-20) 5)作出E-α曲线,由此判定实际点扩散函数的 (40,-10) (37,-10) (39,-10) 参数值α,进而获得实际的点扩散函数 (45,10) (43,11) (4,10) (40,20) (42,20) (40,20) 3实验结果与分析 (35,30) (34,30) (34,30) (30,40) (31,40) (30,40) 3.1直线运动模糊参数估计仿真实验 (25,50) (24,50) (25,50) 为了验证算法的效果,选取一张256×256的8 (20,60) (21,59) (20,60) 位灰度级的lena图像作为测试图像.直线运动模糊 (15,70) (15,71) (15,70) 选取的参数为模糊角度为70°,模糊尺度为30个像 (10,80) (9,82) (9,81) 素.图5显示的是实际模糊参数为(30,70°)的直线 图7为利用本算法检测出模糊参数后进行维纳 运动模糊Lena图像及其频谱.图6是不同直线运动 滤波恢复后的图像。 模糊参数恢复出的图像的PSNR值曲面图