正在加载图片...
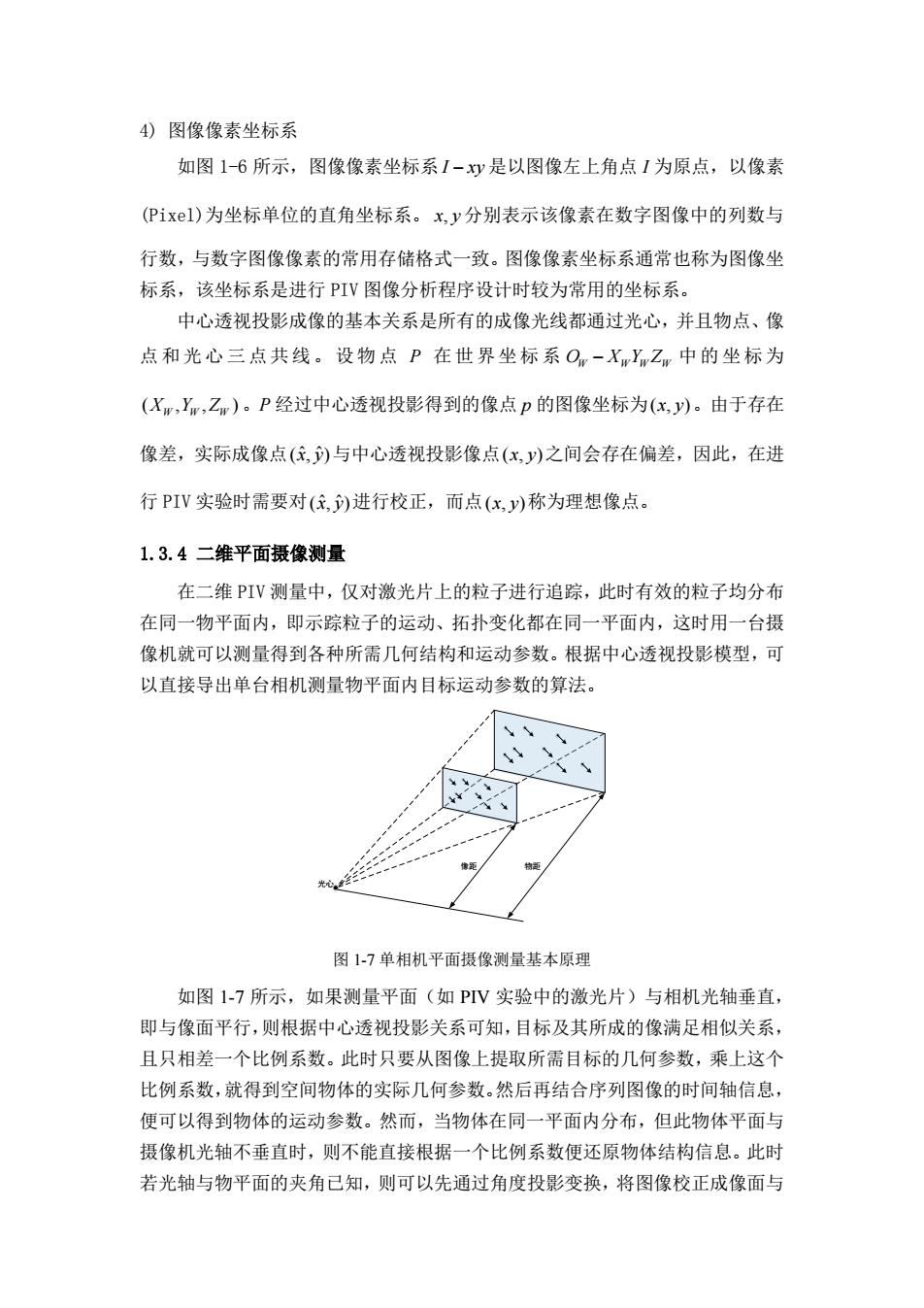
4)图像像素坐标系 如图16所示,图像像素坐标系1-y是以图像左上角点1为原点,以像素 (Pixel)为坐标单位的直角坐标系。x,y分别表示该像素在数字图像中的列数与 行数,与数字图像像素的常用存储格式一致。图像像素坐标系通常也称为图像坐 标系,该坐标系是进行PIV图像分析程序设计时较为常用的坐标系。 中心透视投影成像的基本关系是所有的成像光线都通过光心,并且物点、像 点和光心三点共线。设物点P在世界坐标系On-XwYrZr中的坐标为 (Xw,Y,Z)。P经过中心透视投影得到的像点P的图像坐标为(化,)。由于存在 像差,实际成像点(代,)与中心透视投影像点(x,)之间会存在偏差,因此,在进 行PIV实验时需要对(住,)进行校正,而点(x,)称为理想像点。 1.3.4二维平面摄像测量 在二维PIV测量中,仅对激光片上的粒子进行追踪,此时有效的粒子均分布 在同一物平面内,即示踪粒子的运动、拓扑变化都在同一平面内,这时用一台摄 像机就可以测量得到各种所需几何结构和运动参数。根据中心透视投影模型,可 以直接导出单台相机测量物平面内目标运动参数的算法。 图1-7单相机平面摄像测量基本原理 如图1-7所示,如果测量平面(如V实验中的激光片)与相机光轴垂直, 即与像面平行,则根据中心透视投影关系可知,目标及其所成的像满足相似关系, 且只相差一个比例系数。此时只要从图像上提取所需目标的几何参数,乘上这个 比例系数,就得到空间物体的实际几何参数。然后再结合序列图像的时间轴信息, 便可以得到物体的运动参数。然而,当物体在同一平面内分布,但此物体平面与 摄像机光轴不垂直时,则不能直接根据一个比例系数便还原物体结构信息。此时 若光轴与物平面的夹角已知,则可以先通过角度投影变换,将图像校正成像面与4) 图像像素坐标系 如图 1-6 所示,图像像素坐标系 I xy 是以图像左上角点 I 为原点,以像素 (Pixel)为坐标单位的直角坐标系。 x y, 分别表示该像素在数字图像中的列数与 行数,与数字图像像素的常用存储格式一致。图像像素坐标系通常也称为图像坐 标系,该坐标系是进行 PIV 图像分析程序设计时较为常用的坐标系。 中心透视投影成像的基本关系是所有的成像光线都通过光心,并且物点、像 点 和 光 心 三 点 共线。 设 物 点 P 在 世 界坐 标 系 O X Y Z W W W W 中的坐标为 ( , , ) X Y Z W W W 。P 经过中心透视投影得到的像点 p 的图像坐标为 ( , ) x y 。由于存在 像差,实际成像点 ( , ) x y ˆ ˆ 与中心透视投影像点 ( , ) x y 之间会存在偏差,因此,在进 行 PIV 实验时需要对 ( , ) x y ˆ ˆ 进行校正,而点 ( , ) x y 称为理想像点。 1.3.4 二维平面摄像测量 在二维 PIV 测量中,仅对激光片上的粒子进行追踪,此时有效的粒子均分布 在同一物平面内,即示踪粒子的运动、拓扑变化都在同一平面内,这时用一台摄 像机就可以测量得到各种所需几何结构和运动参数。根据中心透视投影模型,可 以直接导出单台相机测量物平面内目标运动参数的算法。 光心 像距 物距 图 1-7 单相机平面摄像测量基本原理 如图 1-7 所示,如果测量平面(如 PIV 实验中的激光片)与相机光轴垂直, 即与像面平行,则根据中心透视投影关系可知,目标及其所成的像满足相似关系, 且只相差一个比例系数。此时只要从图像上提取所需目标的几何参数,乘上这个 比例系数,就得到空间物体的实际几何参数。然后再结合序列图像的时间轴信息, 便可以得到物体的运动参数。然而,当物体在同一平面内分布,但此物体平面与 摄像机光轴不垂直时,则不能直接根据一个比例系数便还原物体结构信息。此时 若光轴与物平面的夹角已知,则可以先通过角度投影变换,将图像校正成像面与