正在加载图片...
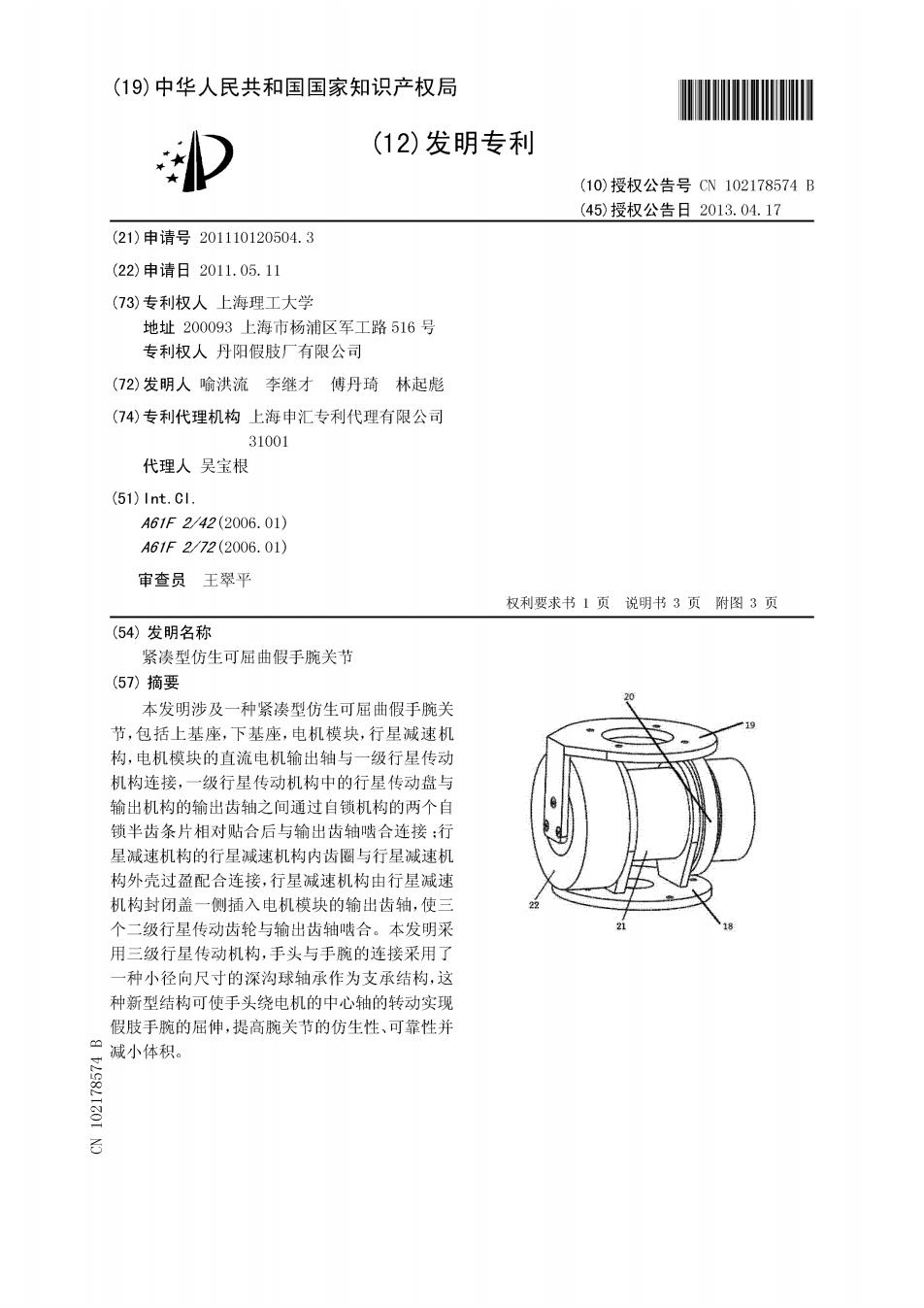
(19)中华人民共和国国家知识产权局 (12)发明专利 (10)授权公告号CN102178574B (45)授权公告日2013.04.17 (21)申请号201110120504.3 (22)申请日2011.05.11 (73)专利权人上海理工大学 地址200093上海市杨浦区军工路516号 专利权人丹阳假肢厂有限公司 (72)发明人喻洪流李继才傅丹琦林起彪 (74)专利代理机构上海申汇专利代理有限公司 31001 代理人吴宝根 (51)1nt.Cl. A61F2/42(2006.01) A61F2/72(2006.01) 审查员王翠平 权利要求书1页说明书3页附图3页 (54)发明名称 紧凑型仿生可屈曲假手腕关节 (57)摘要 本发明涉及一种紧凑型仿生可屈曲假手腕关 节,包括上基座,下基座,电机模块,行星减速机 构,电机模块的直流电机输出轴与一级行星传动 机构连接,一级行星传动机构中的行星传动盘与 输出机构的输出齿轴之间通过自锁机构的两个自 锁半齿条片相对贴合后与输出齿轴啮合连接:行 星减速机构的行星减速机构内齿圈与行星减速机 构外壳过盈配合连接,行星减速机构由行星减速 机构封闭盖一侧插入电机模块的输出齿轴,使三 个二级行星传动齿轮与输出齿轴啮合。本发明采 用三级行星传动机构,手头与手腕的连接采用了 一种小径向尺寸的深沟球轴承作为支承结构,这 种新型结构可使手头绕电机的中心轴的转动实现 假肢手腕的屈伸,提高腕关节的仿生性、可靠性并 二减小体积。 777.2