正在加载图片...
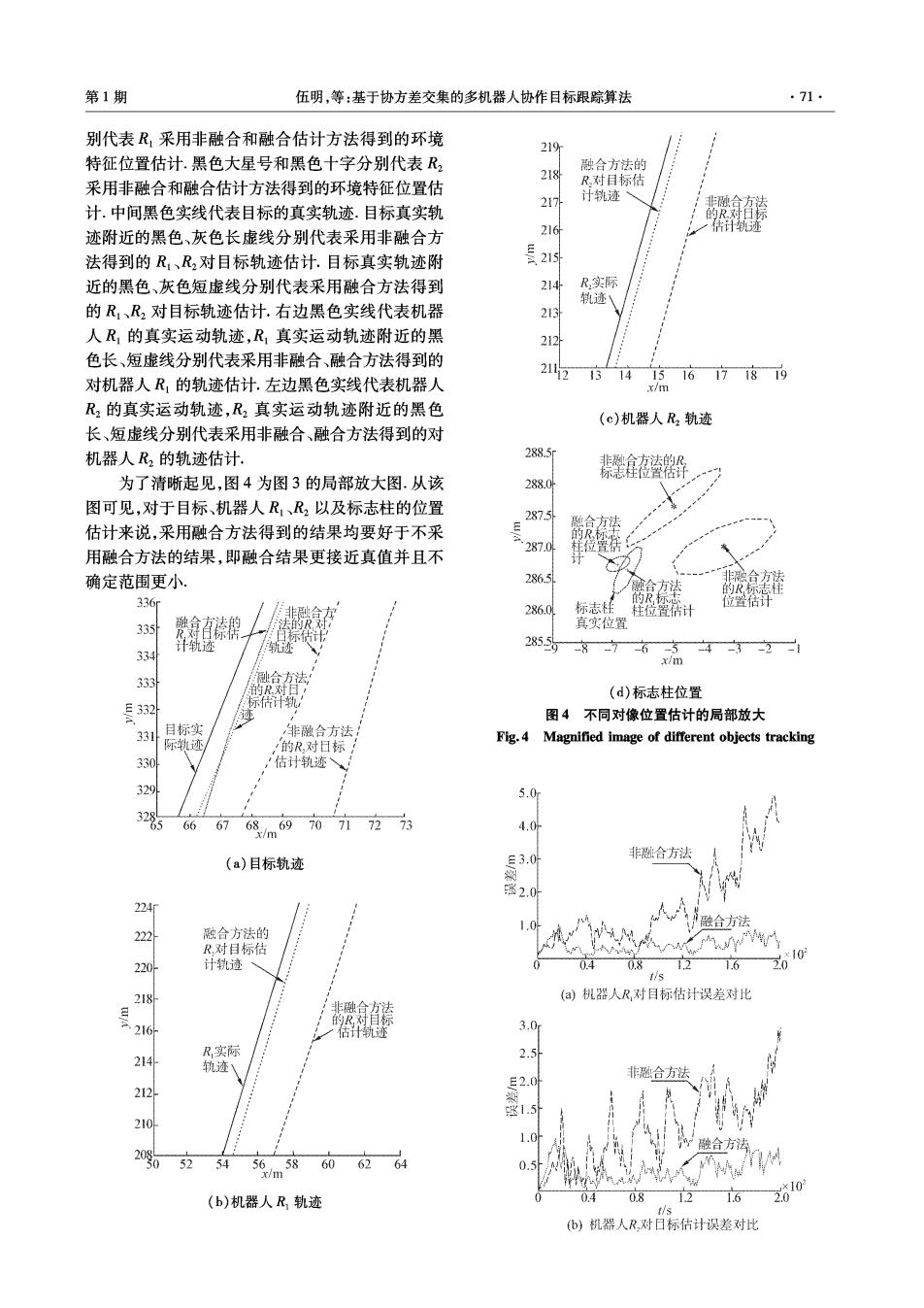
第1期 伍明,等:基于协方差交集的多机器人协作目标跟踪算法 71. 别代表R,采用非融合和融合估计方法得到的环境 219升 特征位置估计.黑色大星号和黑色十字分别代表R2 融合方法的 218 采用非融合和融合估计方法得到的环境特征位置估 R对目标估 217 计轨迹 非融合方法 计.中间黑色实线代表目标的真实轨迹.目标真实轨 迹附近的黑色、灰色长虚线分别代表采用非融合方 216 计轨迹 法得到的R、R2对目标轨迹估计.目标真实轨迹附 复2 近的黑色、灰色短虚线分别代表采用融合方法得到 214 R实际 迹 的R1、R2对目标轨迹估计.右边黑色实线代表机器 213 人R,的真实运动轨迹,R,真实运动轨迹附近的黑 212 色长、短虚线分别代表采用非融合、融合方法得到的 对机器人R,的轨迹估计.左边黑色实线代表机器人 21m 13 14 15 16171819 x/m R2的真实运动轨迹,R2真实运动轨迹附近的黑色 (c)机器人R2轨迹 长、短虚线分别代表采用非融合、融合方法得到的对 机器人R2的轨迹估计. 288.5 为了清晰起见,图4为图3的局部放大图.从该 288.0 图可见,对于目标、机器人R、R2以及标志柱的位置 287.5 估计来说,采用融合方法得到的结果均要好于不采 287.0 用融合方法的结果,即融合结果更接近真值并且不 确定范围更小. 286.5 非融合方法 合方法 志柱 336r 286.0 标志柱 位置估计 柱位置什计 335 融合方适 真实位置 计轨迹 2855 334 -8-7 6542二1 x/m 333 (d)标志柱位置 E332 图4不同对像位置估计的局部放大 331 目标实 非融合方法 际轨迹 Fig.4 Magnified image of different objects tracking ‘的R对日标 330 ,‘估计轨迹。 5.0 66 6> 6869 x/m 70717273 4.0 非逊合方法 (a)目标轨迹 张2.0 224 融合方法 222 融合方法的 R,对目标估 人n 10 220 计轨迹 0.8 1.2 1.6 2.0 t/s 218 (a)机器人R对目标估计误差对比 非融合方法 3.0 R实际 214 2.5 轨迹 212 E2.0叶 非融合方法 1.5 210 1.0 融合方法 0 52 54 m58 56 606264 0.5 (b)机器人R轨迹 0.4 08 12 1.6 6)机器人R,对日标估计误差对比