正在加载图片...
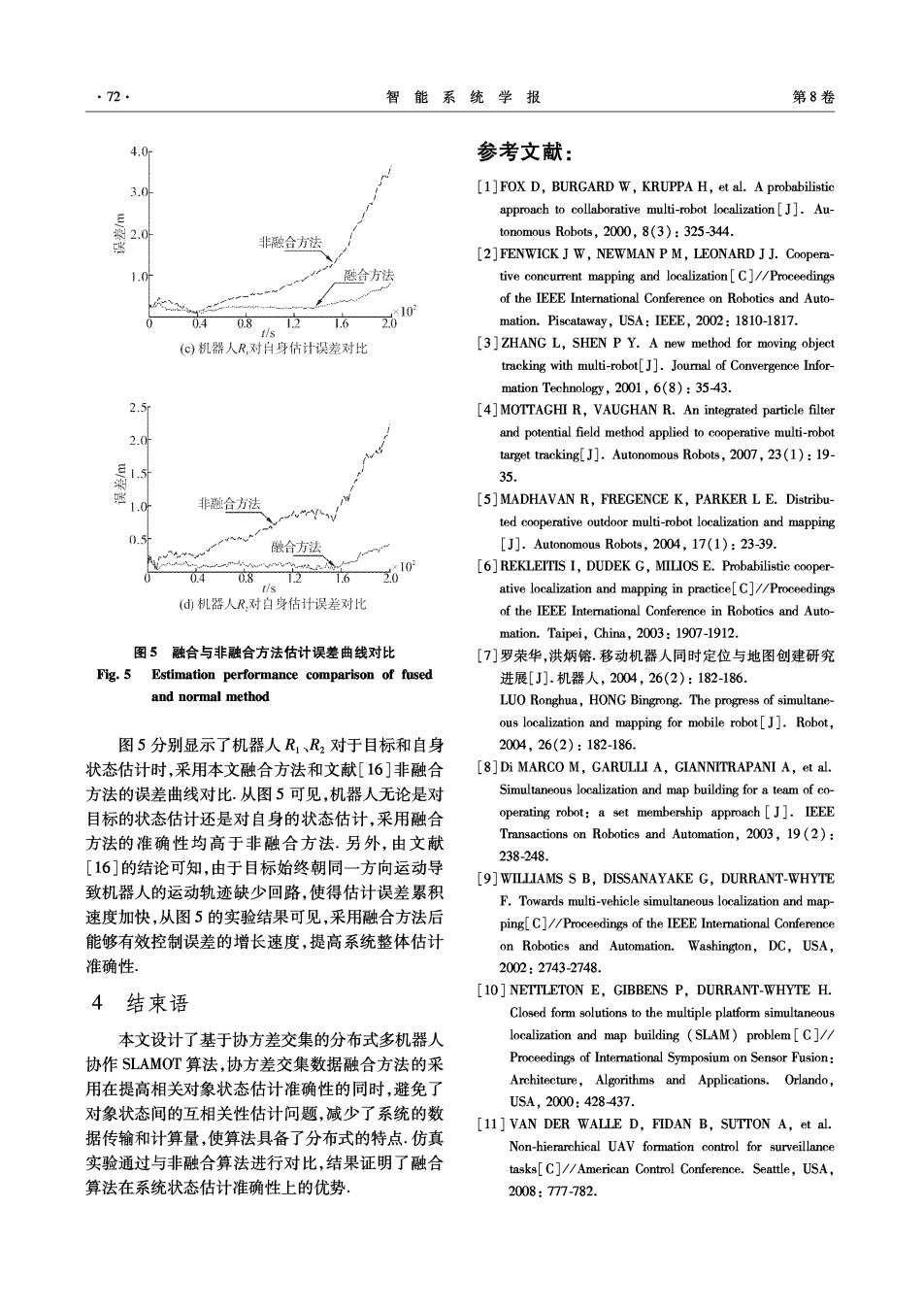
·72 智能系统学报 第8卷 4.0- 参考文献: 3.0 [1]FOX D,BURGARD W,KRUPPA H,et al.A probabilistic E approach to collaborative multi-robot localization[J].Au- 2 tonomous Robots,2000,8(3):325-344. 非融合方法 [2]FENWICK J W,NEWMAN P M,LEONARD JJ.Coopera- 1.0 融合方法 tive concurrent mapping and localization [C]//Proceedings of the IEEE International Conference on Robotics and Auto- 10 0.4 0.8 12 1.6 tis 20 mation.Piscataway,USA:IEEE,2002:1810-1817. (c)机器人R对白身估计误差对比 [3 ZHANG L,SHEN P Y.A new method for moving object tracking with multi-robot[J].Journal of Convergence Infor- mation Technology,2001,6(8):35-43. 2.5 [4]MOTTAGHI R,VAUGHAN R.An integrated particle filter 2.0 and potential field method applied to cooperative multi-robot target tracking[J].Autonomous Robots,2007,23(1):19- 35. 1.0 非融合方法 5]MADHAVAN R,FREGENCE K,PARKER L E.Distribu- ted cooperative outdoor multi-robot localization and mapping 0.5 融合方法 [J].Autonomous Robots,2004,17(1)23-39. 0.408 12 16 ts 2010 [6]REKLEITIS I,DUDEK G,MILIOS E.Probabilistic cooper- ative localization and mapping in practice[C]//Proceedings (d机器人R,对自身估计误差对比 of the IEEE International Conference in Robotics and Auto- mation.Taipei,China,2003:1907-1912. 图5融合与非融合方法估计误差曲线对比 [7]罗荣华,洪炳榕.移动机器人同时定位与地图创建研究 Fig.5 Estimation performance comparison of fused 进展[J].机器人,2004,26(2):182-186. and normal method LUO Ronghua,HONG Bingrong.The progress of simultane- ous localization and mapping for mobile robot[].Robot, 图5分别显示了机器人R,、R2对于目标和自身 2004,26(2):182-186. 状态估计时,采用本文融合方法和文献[16]非融合 [8]Di MARCO M,GARULLI A,GIANNITRAPANI A,et al. 方法的误差曲线对比.从图5可见,机器人无论是对 Simultaneous localization and map building for a team of co- 目标的状态估计还是对自身的状态估计,采用融合 operating robot:a set membership approach [J].IEEE 方法的准确性均高于非融合方法.另外,由文献 Transactions on Robotics and Automation,2003,19(2): 238-248. [16]的结论可知,由于目标始终朝同一方向运动导 [9]WILLIAMS S B,DISSANAYAKE G.DURRANT-WHYTE 致机器人的运动轨迹缺少回路,使得估计误差累积 F.Towards multi-vehicle simultaneous localization and map 速度加快,从图5的实验结果可见,采用融合方法后 ping[C]//Proceedings of the IEEE Intemational Conference 能够有效控制误差的增长速度,提高系统整体估计 on Robotics and Automation.Washington,DC,USA, 准确性。 2002:2743-2748. [10]NETTLETON E,GIBBENS P,DURRANT-WHYTE H. 4结束语 Closed form solutions to the multiple platform simultaneous 本文设计了基于协方差交集的分布式多机器人 localization and map building (SLAM)problem [C]// 协作SLAMOT算法,协方差交集数据融合方法的采 Proceedings of Interational Symposium on Sensor Fusion: 用在提高相关对象状态估计准确性的同时,避免了 Architecture,Algorithms and Applications.Orlando, USA,2000:428-437. 对象状态间的互相关性估计问题,减少了系统的数 [11]VAN DER WALLE D,FIDAN B,SUTTON A,et al. 据传输和计算量,使算法具备了分布式的特点.仿真 Non-hierarchical UAV formation control for surveillance 实验通过与非融合算法进行对比,结果证明了融合 tasks[C]//American Control Conference.Seattle,USA, 算法在系统状态估计准确性上的优势, 2008:777-782