正在加载图片...
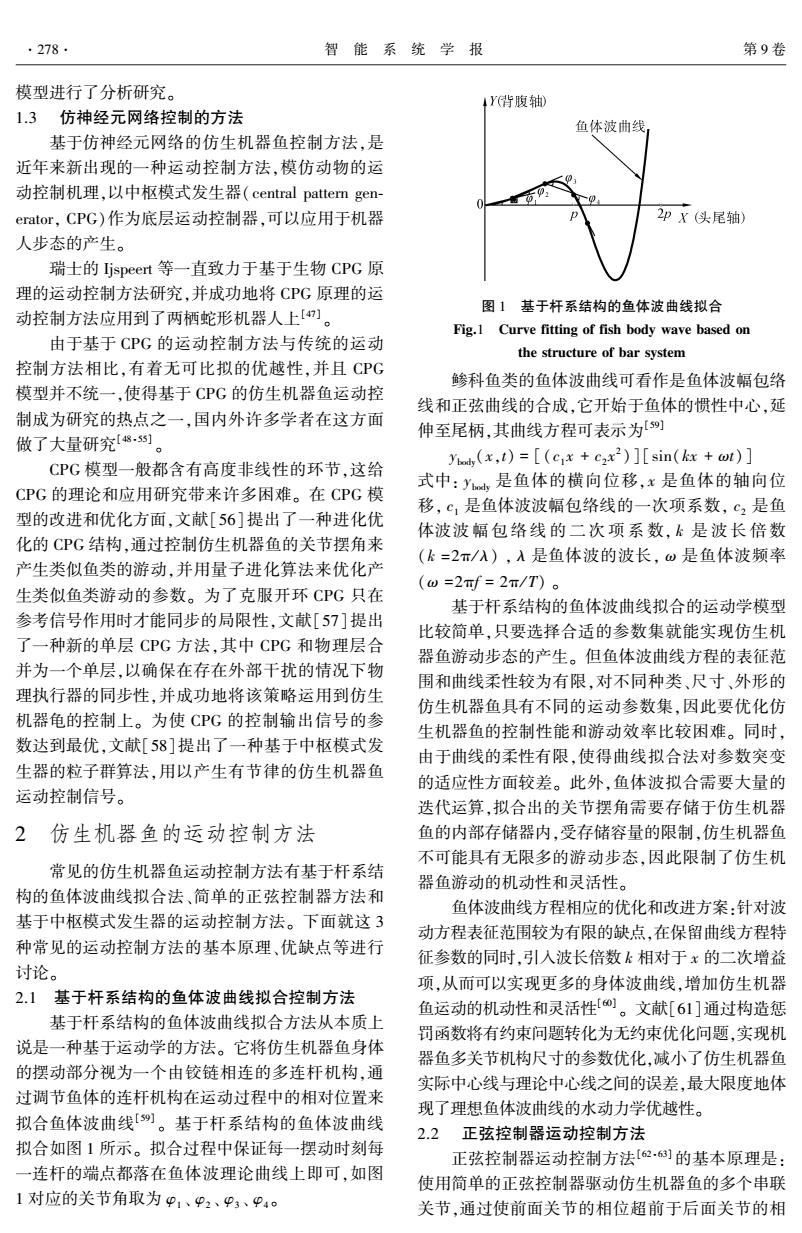
·278. 智能系统学报 第9卷 模型进行了分析研究。 4Y(背腹轴) 1.3仿神经元网络控制的方法 鱼体波曲线 基于仿神经元网络的仿生机器鱼控制方法,是 近年来新出现的一种运动控制方法,模仿动物的运 动控制机理,以中枢模式发生器(central pattern gen- erator,CPG)作为底层运动控制器,可以应用于机器 2pX(头尾轴) 人步态的产生。 瑞士的Ijspeert等一直致力于基于生物CPG原 理的运动控制方法研究,并成功地将CPG原理的运 动控制方法应用到了两栖蛇形机器人上[4)]。 图1基于杆系结构的鱼体波曲线拟合 Fig.1 Curve fitting of fish body wave based on 由于基于CPG的运动控制方法与传统的运动 the structure of bar system 控制方法相比,有着无可比拟的优越性,并且CPG 鲹科鱼类的鱼体波曲线可看作是鱼体波幅包络 模型并不统一,使得基于CPG的仿生机器鱼运动控 线和正弦曲线的合成,它开始于鱼体的惯性中心,延 制成为研究的热点之一,国内外许多学者在这方面 做了大量研究[8)」 伸至尾柄,其曲线方程可表示为[例 CPG模型一般都含有高度非线性的环节,这给 yhad,(x,t)=[(cx +c2x2)][sin(kx wt) 式中:y是鱼体的横向位移,x是鱼体的轴向位 CPG的理论和应用研究带来许多困难。在CPG模 移,c1是鱼体波波幅包络线的一次项系数,c2是鱼 型的改进和优化方面,文献[56]提出了一种进化优 体波波幅包络线的二次项系数,k是波长倍数 化的CPG结构,通过控制仿生机器鱼的关节摆角来 (k=2π/入),入是鱼体波的波长,ω是鱼体波频率 产生类似鱼类的游动,并用量子进化算法来优化产 (w=2f=2π/T)。 生类似鱼类游动的参数。为了克服开环CPG只在 基于杆系结构的鱼体波曲线拟合的运动学模型 参考信号作用时才能同步的局限性,文献[57]提出 比较简单,只要选择合适的参数集就能实现仿生机 了一种新的单层CPG方法,其中CPG和物理层合 器鱼游动步态的产生。但鱼体波曲线方程的表征范 并为一个单层,以确保在存在外部干扰的情况下物 围和曲线柔性较为有限,对不同种类、尺寸、外形的 理执行器的同步性,并成功地将该策略运用到仿生 仿生机器鱼具有不同的运动参数集,因此要优化仿 机器龟的控制上。为使CG的控制输出信号的参 生机器鱼的控制性能和游动效率比较困难。同时, 数达到最优,文献[58]提出了一种基于中枢模式发 由于曲线的柔性有限,使得曲线拟合法对参数突变 生器的粒子群算法,用以产生有节律的仿生机器鱼 的适应性方面较差。此外,鱼体波拟合需要大量的 运动控制信号。 迭代运算,拟合出的关节摆角需要存储于仿生机器 2仿生机器鱼的运动控制方法 鱼的内部存储器内,受存储容量的限制,仿生机器鱼 不可能具有无限多的游动步态,因此限制了仿生机 常见的仿生机器鱼运动控制方法有基于杆系结 器鱼游动的机动性和灵活性。 构的鱼体波曲线拟合法、简单的正弦控制器方法和 鱼体波曲线方程相应的优化和改进方案:针对波 基于中枢模式发生器的运动控制方法。下面就这3 动方程表征范围较为有限的缺点,在保留曲线方程特 种常见的运动控制方法的基本原理、优缺点等进行 征参数的同时,引入波长倍数k相对于x的二次增益 讨论。 项,从而可以实现更多的身体波曲线,增加仿生机器 2.1基于杆系结构的鱼体波曲线拟合控制方法 鱼运动的机动性和灵活性o。文献[61]通过构造惩 基于杆系结构的鱼体波曲线拟合方法从本质上 罚函数将有约束问题转化为无约束优化问题,实现机 说是一种基于运动学的方法。它将仿生机器鱼身体 器鱼多关节机构尺寸的参数优化,减小了仿生机器鱼 的摆动部分视为一个由铰链相连的多连杆机构,通 实际中心线与理论中心线之间的误差,最大限度地体 过调节鱼体的连杆机构在运动过程中的相对位置来 现了理想鱼体波曲线的水动力学优越性。 拟合鱼体波曲线[。基于杆系结构的鱼体波曲线 2.2正弦控制器运动控制方法 拟合如图1所示。拟合过程中保证每一摆动时刻每 正弦控制器运动控制方法[626]的基本原理是: 一连杆的端点都落在鱼体波理论曲线上即可,如图 使用简单的正弦控制器驱动仿生机器鱼的多个串联 1对应的关节角取为P1、P2、P3、P40 关节,通过使前面关节的相位超前于后面关节的相模型进行了分析研究。 1.3 仿神经元网络控制的方法 基于仿神经元网络的仿生机器鱼控制方法,是 近年来新出现的一种运动控制方法,模仿动物的运 动控制机理,以中枢模式发生器(central pattern gen⁃ erator, CPG)作为底层运动控制器,可以应用于机器 人步态的产生。 瑞士的 Ijspeert 等一直致力于基于生物 CPG 原 理的运动控制方法研究,并成功地将 CPG 原理的运 动控制方法应用到了两栖蛇形机器人上[47] 。 由于基于 CPG 的运动控制方法与传统的运动 控制方法相比,有着无可比拟的优越性,并且 CPG 模型并不统一,使得基于 CPG 的仿生机器鱼运动控 制成为研究的热点之一,国内外许多学者在这方面 做了大量研究[48 ⁃ 55] 。 CPG 模型一般都含有高度非线性的环节,这给 CPG 的理论和应用研究带来许多困难。 在 CPG 模 型的改进和优化方面,文献[56]提出了一种进化优 化的 CPG 结构,通过控制仿生机器鱼的关节摆角来 产生类似鱼类的游动,并用量子进化算法来优化产 生类似鱼类游动的参数。 为了克服开环 CPG 只在 参考信号作用时才能同步的局限性,文献[57]提出 了一种新的单层 CPG 方法,其中 CPG 和物理层合 并为一个单层,以确保在存在外部干扰的情况下物 理执行器的同步性,并成功地将该策略运用到仿生 机器龟的控制上。 为使 CPG 的控制输出信号的参 数达到最优,文献[58]提出了一种基于中枢模式发 生器的粒子群算法,用以产生有节律的仿生机器鱼 运动控制信号。 2 仿生机器鱼的运动控制方法 常见的仿生机器鱼运动控制方法有基于杆系结 构的鱼体波曲线拟合法、简单的正弦控制器方法和 基于中枢模式发生器的运动控制方法。 下面就这 3 种常见的运动控制方法的基本原理、优缺点等进行 讨论。 2.1 基于杆系结构的鱼体波曲线拟合控制方法 基于杆系结构的鱼体波曲线拟合方法从本质上 说是一种基于运动学的方法。 它将仿生机器鱼身体 的摆动部分视为一个由铰链相连的多连杆机构,通 过调节鱼体的连杆机构在运动过程中的相对位置来 拟合鱼体波曲线[59] 。 基于杆系结构的鱼体波曲线 拟合如图 1 所示。 拟合过程中保证每一摆动时刻每 一连杆的端点都落在鱼体波理论曲线上即可,如图 1 对应的关节角取为 φ1 、 φ2 、 φ3 、 φ4 。 图 1 基于杆系结构的鱼体波曲线拟合 Fig.1 Curve fitting of fish body wave based on the structure of bar system 鲹科鱼类的鱼体波曲线可看作是鱼体波幅包络 线和正弦曲线的合成,它开始于鱼体的惯性中心,延 伸至尾柄,其曲线方程可表示为[59] ybody(x,t) = [(c1 x + c2 x 2 )][sin(kx + ωt)] 式中: ybody 是鱼体的横向位移,x 是鱼体的轴向位 移, c1 是鱼体波波幅包络线的一次项系数, c2 是鱼 体波波 幅 包 络 线 的 二 次 项 系 数, k 是 波 长 倍 数 (k =2π/ λ) , λ 是鱼体波的波长, ω 是鱼体波频率 (ω =2πf = 2π/ T) 。 基于杆系结构的鱼体波曲线拟合的运动学模型 比较简单,只要选择合适的参数集就能实现仿生机 器鱼游动步态的产生。 但鱼体波曲线方程的表征范 围和曲线柔性较为有限,对不同种类、尺寸、外形的 仿生机器鱼具有不同的运动参数集,因此要优化仿 生机器鱼的控制性能和游动效率比较困难。 同时, 由于曲线的柔性有限,使得曲线拟合法对参数突变 的适应性方面较差。 此外,鱼体波拟合需要大量的 迭代运算,拟合出的关节摆角需要存储于仿生机器 鱼的内部存储器内,受存储容量的限制,仿生机器鱼 不可能具有无限多的游动步态,因此限制了仿生机 器鱼游动的机动性和灵活性。 鱼体波曲线方程相应的优化和改进方案:针对波 动方程表征范围较为有限的缺点,在保留曲线方程特 征参数的同时,引入波长倍数 k 相对于 x 的二次增益 项,从而可以实现更多的身体波曲线,增加仿生机器 鱼运动的机动性和灵活性[60] 。 文献[61]通过构造惩 罚函数将有约束问题转化为无约束优化问题,实现机 器鱼多关节机构尺寸的参数优化,减小了仿生机器鱼 实际中心线与理论中心线之间的误差,最大限度地体 现了理想鱼体波曲线的水动力学优越性。 2.2 正弦控制器运动控制方法 正弦控制器运动控制方法[62 ⁃ 63] 的基本原理是: 使用简单的正弦控制器驱动仿生机器鱼的多个串联 关节,通过使前面关节的相位超前于后面关节的相 ·278· 智 能 系 统 学 报 第 9 卷