正在加载图片...
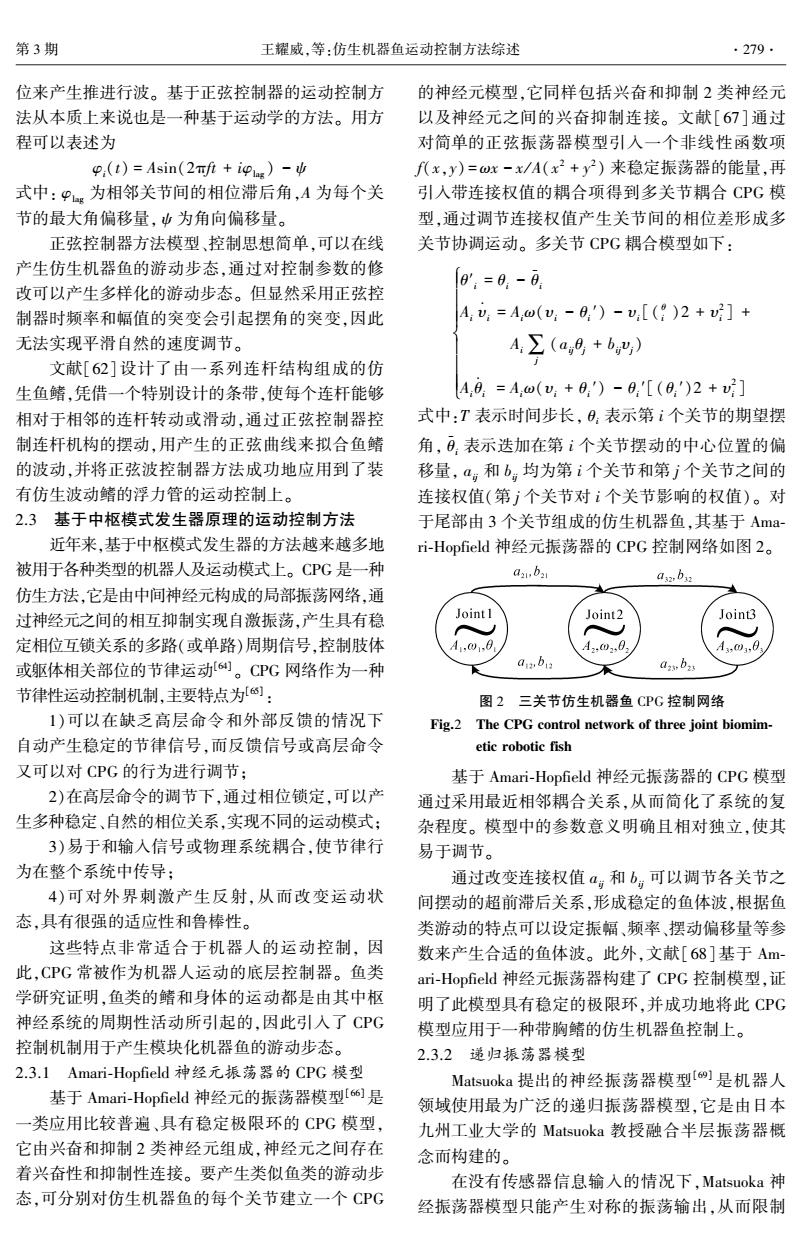
第3期 王耀威,等:仿生机器鱼运动控制方法综述 ·279· 位来产生推进行波。基于正弦控制器的运动控制方 的神经元模型,它同样包括兴奋和抑制2类神经元 法从本质上来说也是一种基于运动学的方法。用方 以及神经元之间的兴奋抑制连接。文献[67]通过 程可以表述为 对简单的正弦振荡器模型引入一个非线性函数项 p:(t)=Asin(2ri+ip)-ψ f(x,y)=wx-x/A(x2+y2)来稳定振荡器的能量,再 式中:P。为相邻关节间的相位滞后角,A为每个关 引入带连接权值的耦合项得到多关节耦合CPG模 节的最大角偏移量,业为角向偏移量。 型,通过调节连接权值产生关节间的相位差形成多 正弦控制器方法模型、控制思想简单,可以在线 关节协调运动。多关节CPG耦合模型如下: 产生仿生机器鱼的游动步态,通过对控制参数的修 0':=0-0 改可以产生多样化的游动步态。但显然采用正弦控 制器时频率和幅值的突变会引起摆角的突变,因此 Av:=A:ω(v:-0')-v,[()2+v]+ 无法实现平滑自然的速度调节。 A:∑(a,9+b,y) 文献[62]设计了由一系列连杆结构组成的仿 生鱼鳍,凭借一个特别设计的条带,使每个连杆能够 A,0:=A,w(v:+0')-0:'[(0,')2+v] 相对于相邻的连杆转动或滑动,通过正弦控制器控 式中:T表示时间步长,0:表示第个关节的期望摆 制连杆机构的摆动,用产生的正弦曲线来拟合鱼鳍 角,8表示迭加在第i个关节摆动的中心位置的偏 的波动,并将正弦波控制器方法成功地应用到了装 移量,a:和b:均为第i个关节和第j个关节之间的 有仿生波动鳍的浮力管的运动控制上。 连接权值(第j个关节对i个关节影响的权值)。对 2.3基于中枢模式发生器原理的运动控制方法 于尾部由3个关节组成的仿生机器鱼,其基于Ama 近年来,基于中枢模式发生器的方法越来越多地 ri-Hopfield神经元振荡器的CPG控制网络如图2。 被用于各种类型的机器人及运动模式上。CPG是一种 axba a3,b2 仿生方法,它是由中间神经元构成的局部振荡网络,通 过神经元之间的相互抑制实现自激振荡,产生具有稳 Joint2 Joint3 定相位互锁关系的多路(或单路)周期信号,控制肢体 1,01,0 12,02,0 43003,日 或躯体相关部位的节律运动6。CPG网络作为一种 aib1 a2s B2s 节律性运动控制机制,主要特点为[]: 图2三关节仿生机器鱼CPG控制网络 1)可以在缺乏高层命令和外部反馈的情况下 Fig.2 The CPG control network of three joint biomim- 自动产生稳定的节律信号,而反馈信号或高层命令 etic robotic fish 又可以对CPG的行为进行调节; 基于Amari-Hopfield神经元振荡器的CPG模型 2)在高层命令的调节下,通过相位锁定,可以产 通过采用最近相邻耦合关系,从而简化了系统的复 生多种稳定、自然的相位关系,实现不同的运动模式; 杂程度。模型中的参数意义明确且相对独立,使其 3)易于和输入信号或物理系统耦合,使节律行 易于调节。 为在整个系统中传导: 通过改变连接权值a:和b:可以调节各关节之 4)可对外界刺激产生反射,从而改变运动状 间摆动的超前滞后关系,形成稳定的鱼体波,根据鱼 态,具有很强的适应性和鲁棒性。 类游动的特点可以设定振幅、频率、摆动偏移量等参 这些特点非常适合于机器人的运动控制,因 数来产生合适的鱼体波。此外,文献[68]基于Am- 此,CPG常被作为机器人运动的底层控制器。鱼类 ari-Hopfield神经元振荡器构建了CPG控制模型,证 学研究证明,鱼类的鳍和身体的运动都是由其中枢 明了此模型具有稳定的极限环,并成功地将此CPG 神经系统的周期性活动所引起的,因此引入了CPG 模型应用于一种带胸鳍的仿生机器鱼控制上。 控制机制用于产生模块化机器鱼的游动步态。 2.3.2递归振荡器模型 2.3.1 Amari-Hopfield神经元振荡器的CPG模型 Matsuoka提出的神经振荡器模型[9]是机器人 基于Amari-Hopfield神经元的振荡器模型[6]是 领域使用最为广泛的递归振荡器模型,它是由日本 一类应用比较普遍、具有稳定极限环的CPG模型, 九州工业大学的Matsuoka教授融合半层振荡器概 它由兴奋和抑制2类神经元组成,神经元之间存在 念而构建的。 着兴奋性和抑制性连接。要产生类似鱼类的游动步 在没有传感器信息输入的情况下,Matsuoka神 态,可分别对仿生机器鱼的每个关节建立一个CPG 经振荡器模型只能产生对称的振荡输出,从而限制位来产生推进行波。 基于正弦控制器的运动控制方 法从本质上来说也是一种基于运动学的方法。 用方 程可以表述为 φi(t) = Asin(2πft + iφlag) - ψ 式中: φlag 为相邻关节间的相位滞后角,A 为每个关 节的最大角偏移量, ψ 为角向偏移量。 正弦控制器方法模型、控制思想简单,可以在线 产生仿生机器鱼的游动步态,通过对控制参数的修 改可以产生多样化的游动步态。 但显然采用正弦控 制器时频率和幅值的突变会引起摆角的突变,因此 无法实现平滑自然的速度调节。 文献[62]设计了由一系列连杆结构组成的仿 生鱼鳍,凭借一个特别设计的条带,使每个连杆能够 相对于相邻的连杆转动或滑动,通过正弦控制器控 制连杆机构的摆动,用产生的正弦曲线来拟合鱼鳍 的波动,并将正弦波控制器方法成功地应用到了装 有仿生波动鳍的浮力管的运动控制上。 2.3 基于中枢模式发生器原理的运动控制方法 近年来,基于中枢模式发生器的方法越来越多地 被用于各种类型的机器人及运动模式上。 CPG 是一种 仿生方法,它是由中间神经元构成的局部振荡网络,通 过神经元之间的相互抑制实现自激振荡,产生具有稳 定相位互锁关系的多路(或单路)周期信号,控制肢体 或躯体相关部位的节律运动[64] 。 CPG 网络作为一种 节律性运动控制机制,主要特点为[65] : 1)可以在缺乏高层命令和外部反馈的情况下 自动产生稳定的节律信号,而反馈信号或高层命令 又可以对 CPG 的行为进行调节; 2)在高层命令的调节下,通过相位锁定,可以产 生多种稳定、自然的相位关系,实现不同的运动模式; 3)易于和输入信号或物理系统耦合,使节律行 为在整个系统中传导; 4)可对外界刺激产生反射,从而改变运动状 态,具有很强的适应性和鲁棒性。 这些特点非常适合于机器人的运动控制, 因 此,CPG 常被作为机器人运动的底层控制器。 鱼类 学研究证明,鱼类的鳍和身体的运动都是由其中枢 神经系统的周期性活动所引起的,因此引入了 CPG 控制机制用于产生模块化机器鱼的游动步态。 2.3.1 Amari⁃Hopfield 神经元振荡器的 CPG 模型 基于 Amari⁃Hopfield 神经元的振荡器模型[66]是 一类应用比较普遍、具有稳定极限环的 CPG 模型, 它由兴奋和抑制 2 类神经元组成,神经元之间存在 着兴奋性和抑制性连接。 要产生类似鱼类的游动步 态,可分别对仿生机器鱼的每个关节建立一个 CPG 的神经元模型,它同样包括兴奋和抑制 2 类神经元 以及神经元之间的兴奋抑制连接。 文献[67] 通过 对简单的正弦振荡器模型引入一个非线性函数项 f(x,y) = ωx - x / A(x 2 + y 2 ) 来稳定振荡器的能量,再 引入带连接权值的耦合项得到多关节耦合 CPG 模 型,通过调节连接权值产生关节间的相位差形成多 关节协调运动。 多关节 CPG 耦合模型如下: θ′i = θi - θ - i Ai υ · i = Aiω(υi - θi ′) - υi[( θ i )2 + υ 2 i ] + Ai∑ j (aij θj + bijυj) Ai θ · i = Aiω(υi + θi ′) - θi ′[(θi ′)2 + υ 2 i ] ì î í ï ï ïï ï ï ïï 式中:T 表示时间步长, θi 表示第 i 个关节的期望摆 角, θ - i 表示迭加在第 i 个关节摆动的中心位置的偏 移量, aij 和 bij 均为第 i 个关节和第 j 个关节之间的 连接权值(第 j 个关节对 i 个关节影响的权值)。 对 于尾部由 3 个关节组成的仿生机器鱼,其基于 Ama⁃ ri⁃Hopfield 神经元振荡器的 CPG 控制网络如图 2。 图 2 三关节仿生机器鱼 CPG 控制网络 Fig.2 The CPG control network of three joint biomim⁃ etic robotic fish 基于 Amari⁃Hopfield 神经元振荡器的 CPG 模型 通过采用最近相邻耦合关系,从而简化了系统的复 杂程度。 模型中的参数意义明确且相对独立,使其 易于调节。 通过改变连接权值 aij 和 bij 可以调节各关节之 间摆动的超前滞后关系,形成稳定的鱼体波,根据鱼 类游动的特点可以设定振幅、频率、摆动偏移量等参 数来产生合适的鱼体波。 此外,文献[68]基于 Am⁃ ari⁃Hopfield 神经元振荡器构建了 CPG 控制模型,证 明了此模型具有稳定的极限环,并成功地将此 CPG 模型应用于一种带胸鳍的仿生机器鱼控制上。 2.3.2 递归振荡器模型 Matsuoka 提出的神经振荡器模型[69] 是机器人 领域使用最为广泛的递归振荡器模型,它是由日本 九州工业大学的 Matsuoka 教授融合半层振荡器概 念而构建的。 在没有传感器信息输入的情况下,Matsuoka 神 经振荡器模型只能产生对称的振荡输出,从而限制 第 3 期 王耀威,等:仿生机器鱼运动控制方法综述 ·279·