正在加载图片...
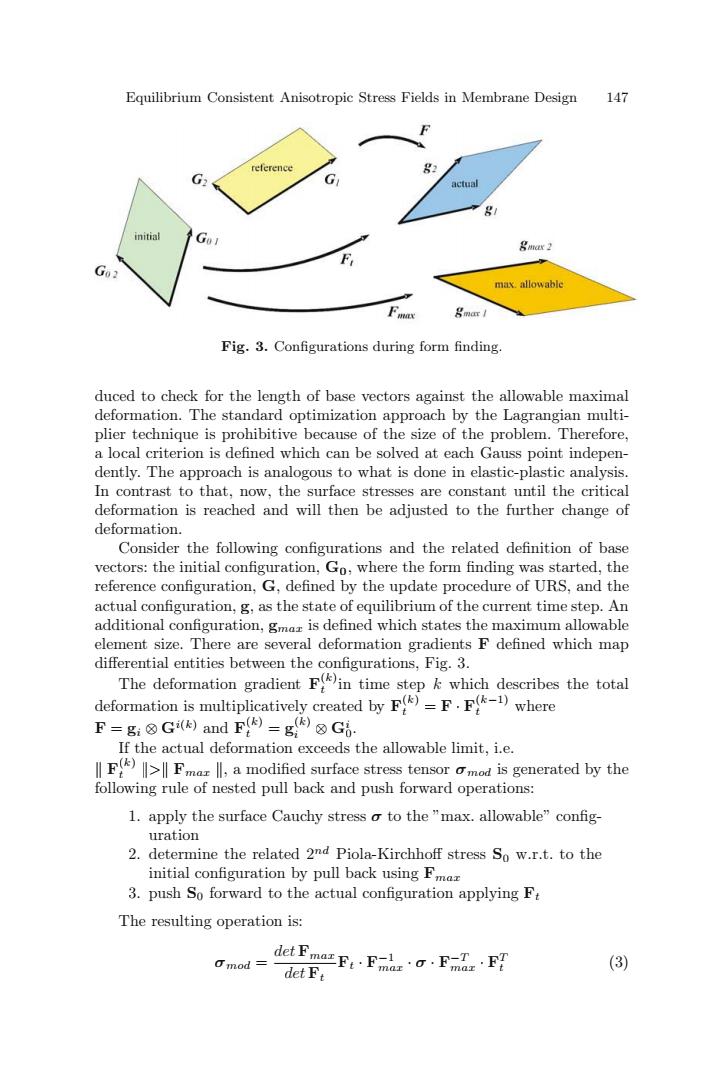
Equilibrium Consistent Anisotropic Stress Fields in Membrane Design 147 F reterence G G actual initial Bmax 2 F max.allowable gmar! Fig.3.Configurations during form finding. duced to check for the length of base vectors against the allowable maximal deformation.The standard optimization approach by the Lagrangian multi- plier technique is prohibitive because of the size of the problem.Therefore, a local criterion is defined which can be solved at each Gauss point indepen- dently.The approach is analogous to what is done in elastic-plastic analysis. In contrast to that,now,the surface stresses are constant until the critical deformation is reached and will then be adjusted to the further change of deformation. Consider the following configurations and the related definition of base vectors:the initial configuration,Go,where the form finding was started,the reference configuration,G,defined by the update procedure of URS,and the actual configuration,g,as the state of equilibrium of the current time step.An additional configuration,gmaz is defined which states the maximum allowable element size.There are several deformation gradients F defined which map differential entities between the configurations,Fig.3. The deformation gradient Fin time stepk which describes the total deformation is multiplicatively created by F)=F.F)where F=g:⑧G(andF=g)®Gi If the actual deformation exceeds the allowable limit,i.e. F)F,a modified surface stress tensor mod is generated by the following rule of nested pull back and push forward operations: 1.apply the surface Cauchy stress o to the"max.allowable"config- uration 2.determine the related 2nd Piola-Kirchhoff stress So w.r.t.to the initial configuration by pull back using Fma 3.push So forward to the actual configuration applying Ft The resulting operation is: Omod= dtEF~Fo,E·野 detF (3)Equilibrium Consistent Anisotropic Stress Fields in Membrane Design 147 Fig. 3. Configurations during form finding. duced to check for the length of base vectors against the allowable maximal deformation. The standard optimization approach by the Lagrangian multiplier technique is prohibitive because of the size of the problem. Therefore, a local criterion is defined which can be solved at each Gauss point independently. The approach is analogous to what is done in elastic-plastic analysis. In contrast to that, now, the surface stresses are constant until the critical deformation is reached and will then be adjusted to the further change of deformation. Consider the following configurations and the related definition of base vectors: the initial configuration, G0, where the form finding was started, the reference configuration, G, defined by the update procedure of URS, and the actual configuration, g, as the state of equilibrium of the current time step. An additional configuration, gmax is defined which states the maximum allowable element size. There are several deformation gradients F defined which map differential entities between the configurations, Fig. 3. The deformation gradient F(k) t in time step k which describes the total deformation is multiplicatively created by F(k) t = F · F(k−1) t where F = gi ⊗ Gi(k) and F(k) t = g(k) i ⊗ Gi 0. If the actual deformation exceeds the allowable limit, i.e. F(k) t > Fmax , a modified surface stress tensor σmod is generated by the following rule of nested pull back and push forward operations: 1. apply the surface Cauchy stress σ to the ”max. allowable” configuration 2. determine the related 2nd Piola-Kirchhoff stress S0 w.r.t. to the initial configuration by pull back using Fmax 3. push S0 forward to the actual configuration applying Ft The resulting operation is: σmod = det Fmax det Ft Ft · F−1 max · σ · F−T max · FT t (3)����