正在加载图片...
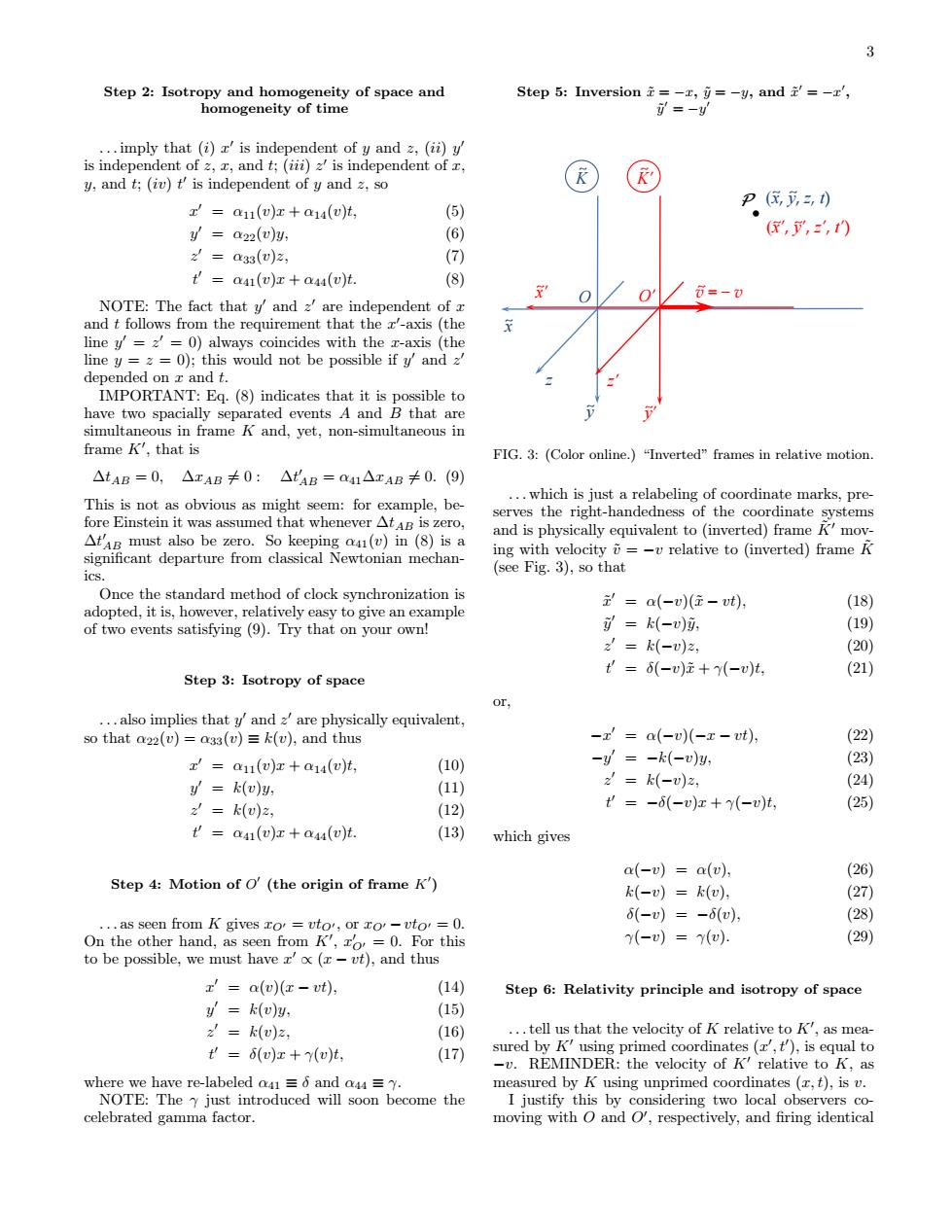
Step 2:Isotropy and homogeneity of space and Step 5:Inversion i=-,i=-y,andi=-', homogeneity of time 动=-y ..imply that (i)x'is independent of y and z,(ii)y is independent of z,x,and t;(iii)z'is independent of x, y,and t;(iv)t'is independent of y and z,so P(民剪,,) r'=a11(v)x+a14(v)t, (5) =a22(v)y, (6) (,,, 2=a33(v)z, (7) t=a41(v)z+a44(v)t. (8) NOTE:The fact that y'and z'are independent of x and t follows from the requirement that the x'-axis (the line y'=2'=0)always coincides with the x-axis (the line y=z=0);this would not be possible if y'and 2' depended on z and t. IMPORTANT:Eq.(8)indicates that it is possible to have two spacially separated events A and B that are 1 simultaneous in frame K and,yet,non-simultaneous in frame K,that is FIG.3:(Color online.)"Inverted"frames in relative motion. △tAB=0,△xAB≠0:△tAB=a41△xAB+0.(9) ..which is just a relabeling of coordinate marks,pre- This is not as obvious as might seem:for example,be- serves the right-handedness of the coordinate systems fore Einstein it was assumed that whenever AtAB is zero, At'AB must also be zero.So keeping a41(v)in (8)is a and is physically equivalent to (inverted)frame K'mov- significant departure from classical Newtonian mechan- ing with velocity i=-v relative to (inverted)frame K ics. (see Fig.3),so that Once the standard method of clock synchronization is =a(-v)(位-vt) (18) adopted,it is,however,relatively easy to give an example of two events satisfying(9).Try that on your own! 到=k(-v), (19) 2'=k(-v)2, (20) t=6(-v):+y(-v)t, (21) Step 3:Isotropy of space or, ..also implies that y'and z'are physically equivalent, so that a22(v)=a33(v)≡k(v),and thus -x'=a(-v)(-x-t), (22) x'=a11(v)z+a14(v)t, (10) -=-k(-v)y, (23) y=k(v)y, (11) 2'=k(-v)z, (24) 2'=k(v)2, (12) =-6(-v)x+y(-v)t, (25) t=a41(v)x+a44(v)t. (13) which gives a(-v)=a(v) (26) Step 4:Motion of O'(the origin of frame K) k(-U)=k(v), (27) ..as seen from K gives xo uto',or o-vto =0. 6(-v)=-6(w), (28) On the other hand,as seen from K,o=0.For this y(-v)=Y(w) (29) to be possible,we must have 'o (x-vt),and thus I'=a(v)(x-ut), (14 Step 6:Relativity principle and isotropy of space y=k(v)4, (15) 2'=k(v)z, (16) ..tell us that the velocity of K relative to K',as mea- t'=8(v)I+y(v)t, (17) sured by K'using primed coordinates (r',t'),is equal to -v.REMINDER:the velocity of K'relative to K,as where we have re-labeled o41≡6anda44≡Y, measured by K using unprimed coordinates (z,t),is v. NOTE:The y just introduced will soon become the I justify this by considering two local observers co- celebrated gamma factor. moving with O and O,respectively,and firing identical3 Step 2: Isotropy and homogeneity of space and homogeneity of time . . . imply that (i) x 0 is independent of y and z, (ii) y 0 is independent of z, x, and t; (iii) z 0 is independent of x, y, and t; (iv) t 0 is independent of y and z, so x 0 = α11(v)x + α14(v)t, (5) y 0 = α22(v)y, (6) z 0 = α33(v)z, (7) t 0 = α41(v)x + α44(v)t. (8) NOTE: The fact that y 0 and z 0 are independent of x and t follows from the requirement that the x 0 -axis (the line y 0 = z 0 = 0) always coincides with the x-axis (the line y = z = 0); this would not be possible if y 0 and z 0 depended on x and t. IMPORTANT: Eq. (8) indicates that it is possible to have two spacially separated events A and B that are simultaneous in frame K and, yet, non-simultaneous in frame K0 , that is ∆tAB = 0, ∆xAB 6= 0 : ∆t 0 AB = α41∆xAB 6= 0. (9) This is not as obvious as might seem: for example, before Einstein it was assumed that whenever ∆tAB is zero, ∆t 0 AB must also be zero. So keeping α41(v) in (8) is a significant departure from classical Newtonian mechanics. Once the standard method of clock synchronization is adopted, it is, however, relatively easy to give an example of two events satisfying (9). Try that on your own! Step 3: Isotropy of space . . . also implies that y 0 and z 0 are physically equivalent, so that α22(v) = α33(v) ≡ k(v), and thus x 0 = α11(v)x + α14(v)t, (10) y 0 = k(v)y, (11) z 0 = k(v)z, (12) t 0 = α41(v)x + α44(v)t. (13) Step 4: Motion of O 0 (the origin of frame K0 ) . . . as seen from K gives xO0 = vtO0 , or xO0 −vtO0 = 0. On the other hand, as seen from K0 , x 0 O0 = 0. For this to be possible, we must have x 0 ∝ (x − vt), and thus x 0 = α(v)(x − vt), (14) y 0 = k(v)y, (15) z 0 = k(v)z, (16) t 0 = δ(v)x + γ(v)t, (17) where we have re-labeled α41 ≡ δ and α44 ≡ γ. NOTE: The γ just introduced will soon become the celebrated gamma factor. Step 5: Inversion x˜ = −x, y˜ = −y, and x˜ 0 = −x 0 , y˜ 0 = −y 0 K K’ (x ’ , y ’ , z ’ , t’) P (x, y, z, t) x ’ O O’ v = − v y ’ z ’ y x z ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ FIG. 3: (Color online.) “Inverted” frames in relative motion. . . . which is just a relabeling of coordinate marks, preserves the right-handedness of the coordinate systems and is physically equivalent to (inverted) frame K˜ 0 moving with velocity ˜v = −v relative to (inverted) frame K˜ (see Fig. 3), so that x˜ 0 = α(−v)(˜x − vt), (18) y˜ 0 = k(−v)˜y, (19) z 0 = k(−v)z, (20) t 0 = δ(−v)˜x + γ(−v)t, (21) or, −x 0 = α(−v)(−x − vt), (22) −y 0 = −k(−v)y, (23) z 0 = k(−v)z, (24) t 0 = −δ(−v)x + γ(−v)t, (25) which gives α(−v) = α(v), (26) k(−v) = k(v), (27) δ(−v) = −δ(v), (28) γ(−v) = γ(v). (29) Step 6: Relativity principle and isotropy of space . . . tell us that the velocity of K relative to K0 , as measured by K0 using primed coordinates (x 0 , t0 ), is equal to −v. REMINDER: the velocity of K0 relative to K, as measured by K using unprimed coordinates (x, t), is v. I justify this by considering two local observers comoving with O and O0 , respectively, and firing identical