正在加载图片...
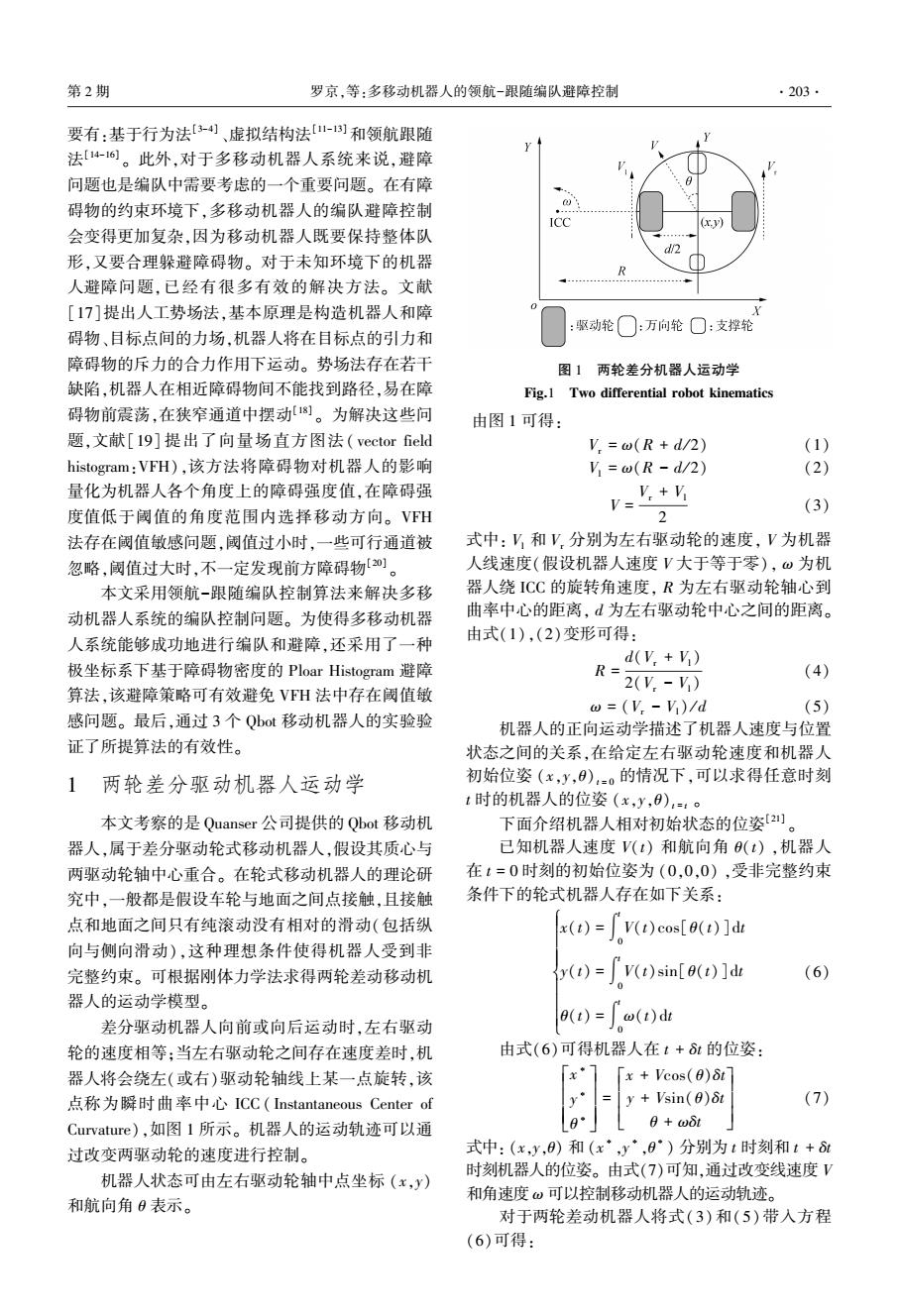
第2期 罗京,等:多移动机器人的领航-跟随编队避障控制 ·203 要有:基于行为法[3)、虚拟结构法1-)和领航跟随 法[46。此外,对于多移动机器人系统来说,避障 问题也是编队中需要考虑的一个重要问题。在有障 碍物的约束环境下,多移动机器人的编队避障控制 ICC x.Y 会变得更加复杂,因为移动机器人既要保持整体队 形,又要合理躲避障碍物。对于未知环境下的机器 R 人避障问题,已经有很多有效的解决方法。文献 [17]提出人工势场法,基本原理是构造机器人和障 :驱动轮○:万向轮○:支撑轮 碍物、目标点间的力场,机器人将在目标点的引力和 障碍物的斥力的合力作用下运动。势场法存在若干 图1两轮差分机器人运动学 缺陷,机器人在相近障碍物间不能找到路径,易在障 Fig.1 Two differential robot kinematics 碍物前震荡,在狭窄通道中摆动18)。为解决这些问 由图1可得: 题,文献[l9]提出了向量场直方图法(vector field V.=w(R+d/2) (1) histogram:VFH),该方法将障碍物对机器人的影响 y=w(R-d/2) (2) 量化为机器人各个角度上的障碍强度值,在障碍强 v=g+斯 (3) 度值低于阈值的角度范围内选择移动方向。VH 2 法存在阈值敏感问题,阈值过小时,一些可行通道被 式中:V和V,分别为左右驱动轮的速度,V为机器 忽略,阈值过大时,不一定发现前方障碍物[0。 人线速度(假设机器人速度V大于等于零),ω为机 本文采用领航-跟随编队控制算法来解决多移 器人绕ICC的旋转角速度,R为左右驱动轮轴心到 动机器人系统的编队控制问题。为使得多移动机器 曲率中心的距离,d为左右驱动轮中心之间的距离。 人系统能够成功地进行编队和避障,还采用了一种 由式(1),(2)变形可得: d(V,+V) 极坐标系下基于障碍物密度的Ploar Histogram避障 R= (4) 2(V-V) 算法,该避障策略可有效避免VFH法中存在阈值敏 w=(V.-y)/d (5) 感问题。最后,通过3个Qbot移动机器人的实验验 机器人的正向运动学描述了机器人速度与位置 证了所提算法的有效性。 状态之间的关系,在给定左右驱动轮速度和机器人 1两轮差分驱动机器人运动学 初始位姿(x,y,0),=。的情况下,可以求得任意时刻 t时的机器人的位姿(x,y,θ),=4。 本文考察的是Quanser公司提供的Qbot移动机 下面介绍机器人相对初始状态的位姿2) 器人,属于差分驱动轮式移动机器人,假设其质心与 已知机器人速度V(t)和航向角(t),机器人 两驱动轮轴中心重合。在轮式移动机器人的理论研 在t=0时刻的初始位姿为(0,0,0),受非完整约束 究中,一般都是假设车轮与地面之间点接触,且接触 条件下的轮式机器人存在如下关系: 点和地面之间只有纯滚动没有相对的滑动(包括纵 x(t)=V(t)cos[e(t)dt 向与侧向滑动),这种理想条件使得机器人受到非 完整约束。可根据刚体力学法求得两轮差动移动机 y(t)=[v(t)sin[0(t)]dt (6) 0 器人的运动学模型。 差分驱动机器人向前或向后运动时,左右驱动 0e)=ja()t 轮的速度相等:当左右驱动轮之间存在速度差时,机 由式(6)可得机器人在t+8t的位姿: 器人将会绕左(或右)驱动轮轴线上某一点旋转,该 t* x+Vcos(0)8t 点称为瞬时曲率中心ICC(Instantaneous Center of y+Vsin(0)St (7) Curvature),如图1所示。机器人的运动轨迹可以通 0+wδt 过改变两驱动轮的速度进行控制。 式中:(x,y,0)和(x·,y·,0°)分别为t时刻和t+ 机器人状态可由左右驱动轮轴中点坐标(x,y) 时刻机器人的位姿。由式(7)可知,通过改变线速度V 和角速度。可以控制移动机器人的运动轨迹。 和航向角0表示。 对于两轮差动机器人将式(3)和(5)带入方程 (6)可得:要有:基于行为法[3-4] 、虚拟结构法[11-13]和领航跟随 法[14-16] 。 此外,对于多移动机器人系统来说,避障 问题也是编队中需要考虑的一个重要问题。 在有障 碍物的约束环境下,多移动机器人的编队避障控制 会变得更加复杂,因为移动机器人既要保持整体队 形,又要合理躲避障碍物。 对于未知环境下的机器 人避障问题,已经有很多有效的解决方法。 文献 [17]提出人工势场法,基本原理是构造机器人和障 碍物、目标点间的力场,机器人将在目标点的引力和 障碍物的斥力的合力作用下运动。 势场法存在若干 缺陷,机器人在相近障碍物间不能找到路径,易在障 碍物前震荡,在狭窄通道中摆动[18] 。 为解决这些问 题,文献[19] 提出了向量场直方图法( vector field histogram:VFH),该方法将障碍物对机器人的影响 量化为机器人各个角度上的障碍强度值,在障碍强 度值低于阈值的角度范围内选择移动方向。 VFH 法存在阈值敏感问题,阈值过小时,一些可行通道被 忽略,阈值过大时,不一定发现前方障碍物[20] 。 本文采用领航-跟随编队控制算法来解决多移 动机器人系统的编队控制问题。 为使得多移动机器 人系统能够成功地进行编队和避障,还采用了一种 极坐标系下基于障碍物密度的 Ploar Histogram 避障 算法,该避障策略可有效避免 VFH 法中存在阈值敏 感问题。 最后,通过 3 个 Qbot 移动机器人的实验验 证了所提算法的有效性。 1 两轮差分驱动机器人运动学 本文考察的是 Quanser 公司提供的 Qbot 移动机 器人,属于差分驱动轮式移动机器人,假设其质心与 两驱动轮轴中心重合。 在轮式移动机器人的理论研 究中,一般都是假设车轮与地面之间点接触,且接触 点和地面之间只有纯滚动没有相对的滑动(包括纵 向与侧向滑动),这种理想条件使得机器人受到非 完整约束。 可根据刚体力学法求得两轮差动移动机 器人的运动学模型。 差分驱动机器人向前或向后运动时,左右驱动 轮的速度相等;当左右驱动轮之间存在速度差时,机 器人将会绕左(或右)驱动轮轴线上某一点旋转,该 点称为瞬时曲率中心 ICC ( Instantaneous Center of Curvature),如图 1 所示。 机器人的运动轨迹可以通 过改变两驱动轮的速度进行控制。 机器人状态可由左右驱动轮轴中点坐标 (x,y) 和航向角 θ 表示。 图 1 两轮差分机器人运动学 Fig.1 Two differential robot kinematics 由图 1 可得: Vr = ω(R + d / 2) (1) Vl = ω(R - d / 2) (2) V = Vr + Vl 2 (3) 式中: Vl 和 Vr 分别为左右驱动轮的速度, V 为机器 人线速度(假设机器人速度 V 大于等于零), ω 为机 器人绕 ICC 的旋转角速度, R 为左右驱动轮轴心到 曲率中心的距离, d 为左右驱动轮中心之间的距离。 由式(1),(2)变形可得: R = d(Vr + Vl) 2(Vr - Vl) (4) ω = (Vr - Vl) / d (5) 机器人的正向运动学描述了机器人速度与位置 状态之间的关系,在给定左右驱动轮速度和机器人 初始位姿 (x,y,θ)t = 0 的情况下,可以求得任意时刻 t 时的机器人的位姿 (x,y,θ)t = t 。 下面介绍机器人相对初始状态的位姿[21] 。 已知机器人速度 V(t) 和航向角 θ(t) ,机器人 在 t = 0 时刻的初始位姿为 (0,0,0) ,受非完整约束 条件下的轮式机器人存在如下关系: x(t) = ∫ t 0 V(t)cos[θ(t)]dt y(t) = ∫ t 0 V(t)sin[θ(t)]dt θ(t) = ∫ t 0 ω(t)dt ì î í ï ï ïï ï ï ï (6) 由式(6)可得机器人在 t + δt 的位姿: x ∗ y ∗ θ ∗ é ë ê ê êê ù û ú ú úú = x + Vcos(θ)δt y + Vsin(θ)δt θ + ωδt é ë ê ê ê ù û ú ú ú (7) 式中: (x,y,θ) 和 (x ∗ ,y ∗ ,θ ∗ ) 分别为 t 时刻和 t + δt 时刻机器人的位姿。 由式(7)可知,通过改变线速度 V 和角速度 ω 可以控制移动机器人的运动轨迹。 对于两轮差动机器人将式(3)和(5)带入方程 (6)可得: 第 2 期 罗京,等:多移动机器人的领航-跟随编队避障控制 ·203·