正在加载图片...
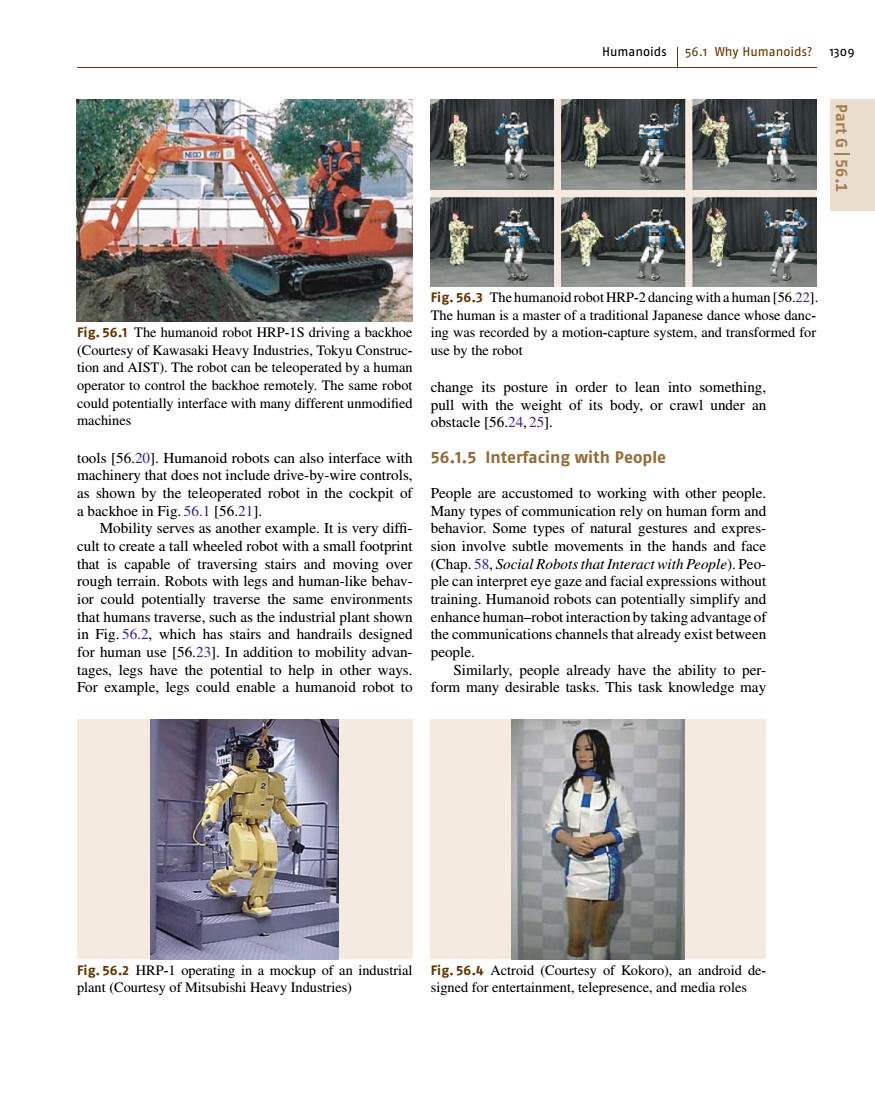
Humanoids 56.1 Why Humanoids? 1309 Part G56. Fig.56.3 The humanoid robot HRP-2 dancing with a human [56.22]. The human is a master of a traditional Japanese dance whose danc- Fig.56.1 The humanoid robot HRP-IS driving a backhoe ing was recorded by a motion-capture system,and transformed for (Courtesy of Kawasaki Heavy Industries,Tokyu Construc- use by the robot tion and AIST).The robot can be teleoperated by a human operator to control the backhoe remotely.The same robot change its posture in order to lean into something, could potentially interface with many different unmodified pull with the weight of its body,or crawl under an machines obstacle [56.24,251. tools [56.20].Humanoid robots can also interface with 56.1.5 Interfacing with People machinery that does not include drive-by-wire controls, as shown by the teleoperated robot in the cockpit of People are accustomed to working with other people. a backhoe in Fig.56.1 [56.211. Many types of communication rely on human form and Mobility serves as another example.It is very diffi-behavior.Some types of natural gestures and expres- cult to create a tall wheeled robot with a small footprint sion involve subtle movements in the hands and face that is capable of traversing stairs and moving over (Chap.58,Social Robots that Interact with People).Peo- rough terrain.Robots with legs and human-like behav- ple can interpret eye gaze and facial expressions without ior could potentially traverse the same environments training.Humanoid robots can potentially simplify and that humans traverse,such as the industrial plant shown enhance human-robot interaction by taking advantage of in Fig.56.2,which has stairs and handrails designed the communications channels that already exist between for human use [56.23].In addition to mobility advan-people. tages,legs have the potential to help in other ways. Similarly,people already have the ability to per- For example,legs could enable a humanoid robot to form many desirable tasks.This task knowledge may Fig.56.2 HRP-1 operating in a mockup of an industrial Fig.56.4 Actroid (Courtesy of Kokoro),an android de- plant(Courtesy of Mitsubishi Heavy Industries) signed for entertainment,telepresence,and media rolesHumanoids 56.1 Why Humanoids? 1309 Fig. 56.1 The humanoid robot HRP-1S driving a backhoe (Courtesy of Kawasaki Heavy Industries, Tokyu Construction and AIST). The robot can be teleoperated by a human operator to control the backhoe remotely. The same robot could potentially interface with many different unmodified machines tools [56.20]. Humanoid robots can also interface with machinery that does not include drive-by-wire controls, as shown by the teleoperated robot in the cockpit of a backhoe in Fig. 56.1 [56.21]. Mobility serves as another example. It is very diffi- cult to create a tall wheeled robot with a small footprint that is capable of traversing stairs and moving over rough terrain. Robots with legs and human-like behavior could potentially traverse the same environments that humans traverse, such as the industrial plant shown in Fig. 56.2, which has stairs and handrails designed for human use [56.23]. In addition to mobility advantages, legs have the potential to help in other ways. For example, legs could enable a humanoid robot to Fig. 56.2 HRP-1 operating in a mockup of an industrial plant (Courtesy of Mitsubishi Heavy Industries) Fig. 56.3 The humanoid robot HRP-2 dancing with a human [56.22]. The human is a master of a traditional Japanese dance whose dancing was recorded by a motion-capture system, and transformed for use by the robot change its posture in order to lean into something, pull with the weight of its body, or crawl under an obstacle [56.24, 25]. 56.1.5 Interfacing with People People are accustomed to working with other people. Many types of communication rely on human form and behavior. Some types of natural gestures and expression involve subtle movements in the hands and face (Chap. 58, Social Robots that Interact with People). People can interpret eye gaze and facial expressions without training. Humanoid robots can potentially simplify and enhance human–robot interaction by taking advantage of the communications channels that already exist between people. Similarly, people already have the ability to perform many desirable tasks. This task knowledge may Fig. 56.4 Actroid (Courtesy of Kokoro), an android designed for entertainment, telepresence, and media roles Part G 56.1