正在加载图片...
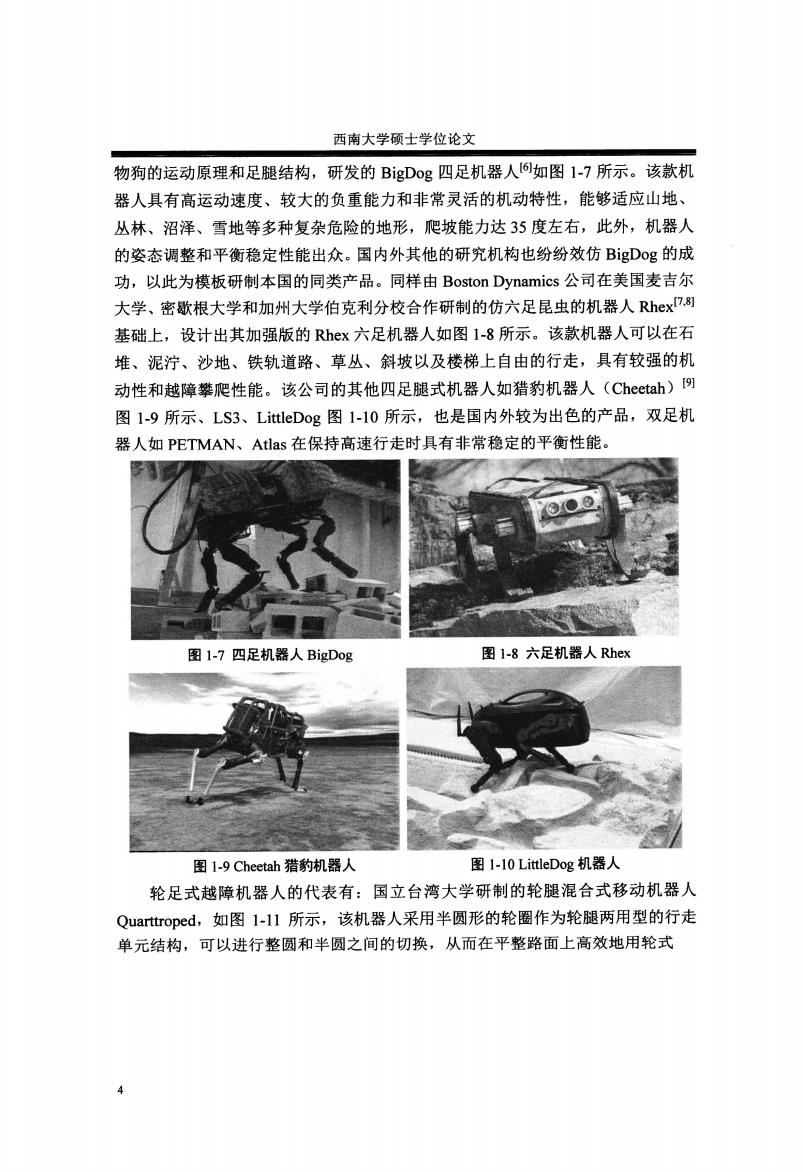
西南大学硕士学位论文 物狗的运动原理和足腿结构,研发的BgD0g四足机器人如图1-7所示。该款机 器人具有高运动速度、较大的负重能力和非常灵活的机动特性,能够适应山地、 丛林、沼泽、雪地等多种复杂危险的地形,爬坡能力达35度左右,此外,机器人 的姿态调整和平衡稳定性能出众。国内外其他的研究机构也纷纷效仿BgD0g的成 功,以此为模板研制本国的同类产品。同样由Boston Dynamics公司在美国麦吉尔 大学、密歇根大学和加州大学伯克利分校合作研制的仿六足昆虫的机器人Rhex7,] 基础上,设计出其加强版的Rhex六足机器人如图1-8所示。该款机器人可以在石 堆、泥泞、沙地、铁轨道路、草丛、斜坡以及楼梯上自由的行走,具有较强的机 动性和越障攀爬性能。该公司的其他四足腿式机器人如猎豹机器人(Cheetah)[) 图1-9所示、LS3、LittleDog图1-10所示,也是国内外较为出色的产品,双足机 器人如PETMAN、Atlas在保持高速行走时具有非常稳定的平衡性能。 图1-7四足机器人BigDog 图1-8六足机器人Rhex 图l-9 Cheetah猎豹机器人 图1-l0 LittleDog机器人 轮足式越障机器人的代表有:国立台湾大学研制的轮腿混合式移动机器人 Quarttroped,如图l-11所示,该机器人采用半圆形的轮圈作为轮腿两用型的行走 单元结构,可以进行整圆和半圆之间的切换,从而在平整路面上高效地用轮式西南大学硕士学位论文 物狗的运动原理和足腿结构,研发的BigDog四足机器人【6】如图1。7所示。该款机 器人具有高运动速度、较大的负重能力和非常灵活的机动特性,能够适应山地、 丛林、沼泽、雪地等多种复杂危险的地形,爬坡能力达35度左右,此外,机器人 的姿态调整和平衡稳定性能出众。国内外其他的研究机构也纷纷效仿BigDog的成 功,以此为模板研制本国的同类产品。同样由Boston Dyn锄ics公司在美国麦吉尔 大学、密歇根大学和加州大学伯克利分校合作研制的仿六足昆虫的机器人Imex【7岿J 基础上,设计出其加强版的l孙ex六足机器人如图1.8所示。该款机器人可以在石 堆、泥泞、沙地、铁轨道路、草丛、斜坡以及楼梯上自由的行走,具有较强的机 动性和越障攀爬性能。该公司的其他四足腿式机器人如猎豹机器人(Cheetah)例 图1.9所示、LS3、LittleDog图1.10所示,也是国内外较为出色的产品,双足机 器人如PETMAN、Atlas在保持高速行走时具有非常稳定的平衡性能。 图l。7四足机器人BigDog 鬻j搿’鬻l箨熬罄 … Ⅵ。 图1.8六足机器人Rhex 图1.9 Che鲍lll猎豹机器人 图1.10 Li牡leDog机器人 轮足式越障机器人的代表有:国立台湾大学研制的轮腿混合式移动机器人 Quarttroped,如图1.1l所示,该机器人采用半圆形的轮圈作为轮腿两用型的行走 单元结构,可以进行整圆和半圆之间的切换,从而在平整路面上高效地用轮式