正在加载图片...
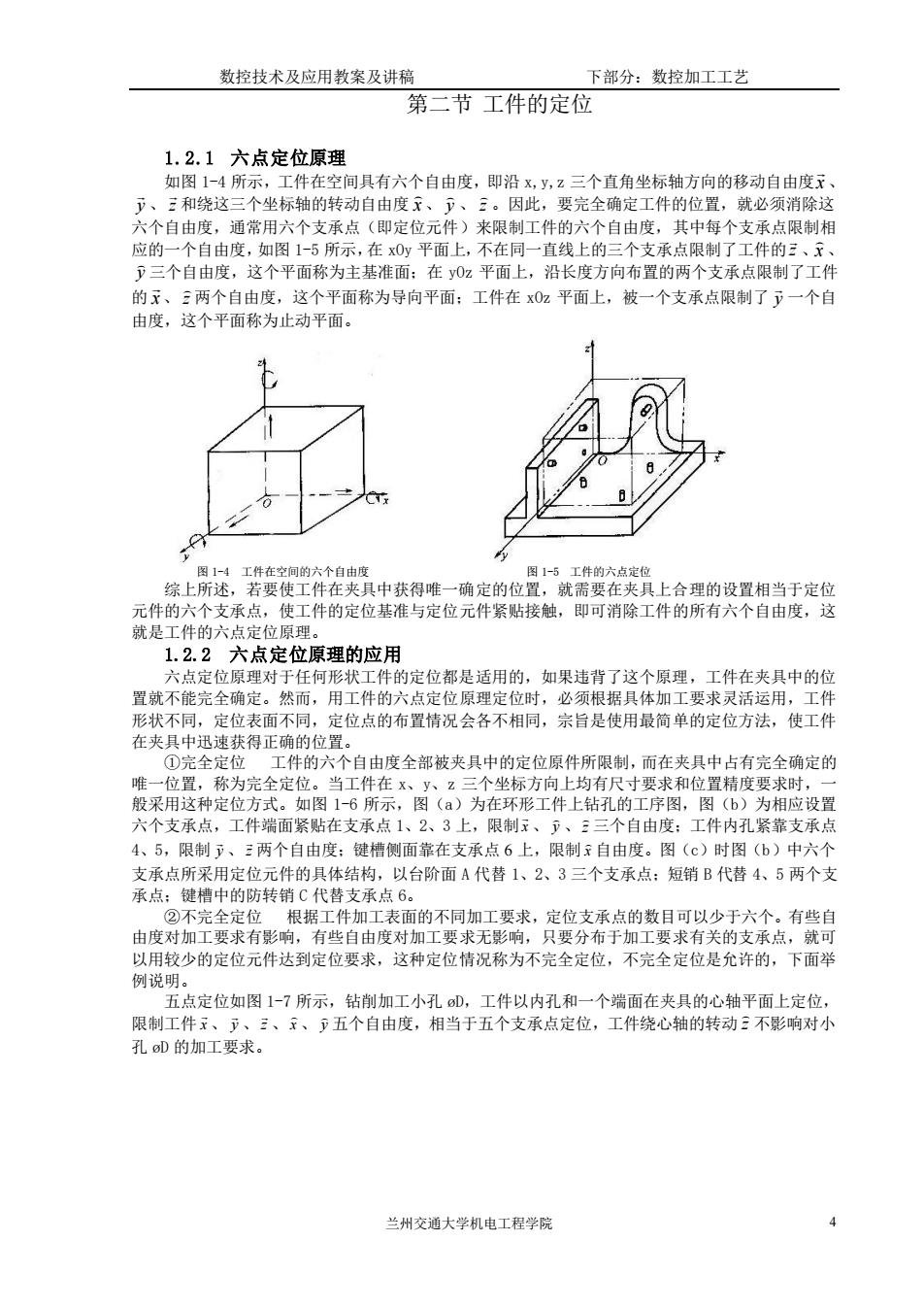
数控技术及应用教案及讲稿 下部分:数控加工工艺 第二节工件的定位 1.2.1六点定位原理 T件在空间且右六个白由府,阳沿文,文z二个直角坐标轴方向的移动白由度下 、三和绕这三个坐标轴的转动自由度】 、。因此 ,要完全确定工件的位置,就必须消除这 六个自由度,通常用六个支承点(即定位元件)来限制工件的六个自由度,其中每个支承点限制相 二个自由度,如图1-5所 .在xOw平面上. 百线上的 、古话占 件的三、 应的个自即及文平面森为主基准面:在2平面上,沿长度方向布宫的两限制了 占 限制了工件 的、三两个自由度,这个平面称为导向平面:工件在x0红平面上,被一个支承点限制了)一个自 由度,这个平面称为止动平面。 综上所述,若要徒件推夹头中获得唯一确定的位量,就需要在夹具上合理的设置相当于定位 元件的六个支承点,使工件的定位基准与定位元件紧贴接触,即可消除工件的所有六个自由度,这 就是工件的六点定位原理。 1.2.2六点定位原理的应用 六点定位原理对于任何形状工件的定位都是适用的,如果违背了这个原理,工件在夹具中的位 置就不能完全确定。然而,用工件的六点定位原理定位时,必须根据具体加工要求灵活运用,工件 形状不同,定位表面不同,定位点的布置情况会各不相同,宗旨是使用最简单的定位方法,使工件 在夹具中迅速获得正确的位置。 工件的六 自由度全部被夹具中 的定位 件所限制,而在夹具中 占有完全确定的 如图6 工件端面紧贴在支点, 2、3上,限制 、自由度:工件内孔紧靠支承点 4、5,限制 :两个自由度 健侧面靠在支承点6上,限制自由度。图 (c)时图(b)中六 支承点所采用定 应件的具体 结构,以台阶面A代替1、2、3三个支承点:短销B代替4、5两个支 承点:健槽中的 防转销C代替支 的 同加工 支承点的数 曲监国时定和收不东金在 有些自由度对 不完全定位是允许 例说 五点定位如图1-7所示,钻削加工小孔D,工件以内孔和一个端面在夹具的心轴平面上定位, 限制工件、了、三、、五个自由度,相当于五个支承点定位,工件绕心轴的转动三不影响对小 孔D的加工要求。 兰州交通大学机电工程学院数控技术及应用教案及讲稿 下部分:数控加工工艺 兰州交通大学机电工程学院 4 第二节 工件的定位 1.2.1 六点定位原理 如图 1-4 所示,工件在空间具有六个自由度,即沿 x,y,z 三个直角坐标轴方向的移动自由度 x 、 y 、 z 和绕这三个坐标轴的转动自由度 x 、 y 、 z 。因此,要完全确定工件的位置,就必须消除这 六个自由度,通常用六个支承点(即定位元件)来限制工件的六个自由度,其中每个支承点限制相 应的一个自由度,如图 1-5 所示,在 xOy 平面上,不在同一直线上的三个支承点限制了工件的 z 、x 、 y 三个自由度,这个平面称为主基准面;在 yOz 平面上,沿长度方向布置的两个支承点限制了工件 的 x 、 z 两个自由度,这个平面称为导向平面;工件在 xOz 平面上,被一个支承点限制了 y 一个自 由度,这个平面称为止动平面。 图 1-4 工件在空间的六个自由度 图 1-5 工件的六点定位 综上所述,若要使工件在夹具中获得唯一确定的位置,就需要在夹具上合理的设置相当于定位 元件的六个支承点,使工件的定位基准与定位元件紧贴接触,即可消除工件的所有六个自由度,这 就是工件的六点定位原理。 1.2.2 六点定位原理的应用 六点定位原理对于任何形状工件的定位都是适用的,如果违背了这个原理,工件在夹具中的位 置就不能完全确定。然而,用工件的六点定位原理定位时,必须根据具体加工要求灵活运用,工件 形状不同,定位表面不同,定位点的布置情况会各不相同,宗旨是使用最简单的定位方法,使工件 在夹具中迅速获得正确的位置。 ①完全定位 工件的六个自由度全部被夹具中的定位原件所限制,而在夹具中占有完全确定的 唯一位置,称为完全定位。当工件在 x、y、z 三个坐标方向上均有尺寸要求和位置精度要求时,一 般采用这种定位方式。如图 1-6 所示,图(a)为在环形工件上钻孔的工序图,图(b)为相应设置 六个支承点,工件端面紧贴在支承点 1、2、3 上,限制 x 、 y 、z 三个自由度;工件内孔紧靠支承点 4、5,限制 y 、z 两个自由度;键槽侧面靠在支承点 6 上,限制 x 自由度。图(c)时图(b)中六个 支承点所采用定位元件的具体结构,以台阶面 A 代替 1、2、3 三个支承点;短销 B 代替 4、5 两个支 承点;键槽中的防转销 C 代替支承点 6。 ②不完全定位 根据工件加工表面的不同加工要求,定位支承点的数目可以少于六个。有些自 由度对加工要求有影响,有些自由度对加工要求无影响,只要分布于加工要求有关的支承点,就可 以用较少的定位元件达到定位要求,这种定位情况称为不完全定位,不完全定位是允许的,下面举 例说明。 五点定位如图 1-7 所示,钻削加工小孔 øD,工件以内孔和一个端面在夹具的心轴平面上定位, 限制工件 x 、 y 、z 、x 、 y 五个自由度,相当于五个支承点定位,工件绕心轴的转动 z 不影响对小 孔 øD 的加工要求