正在加载图片...
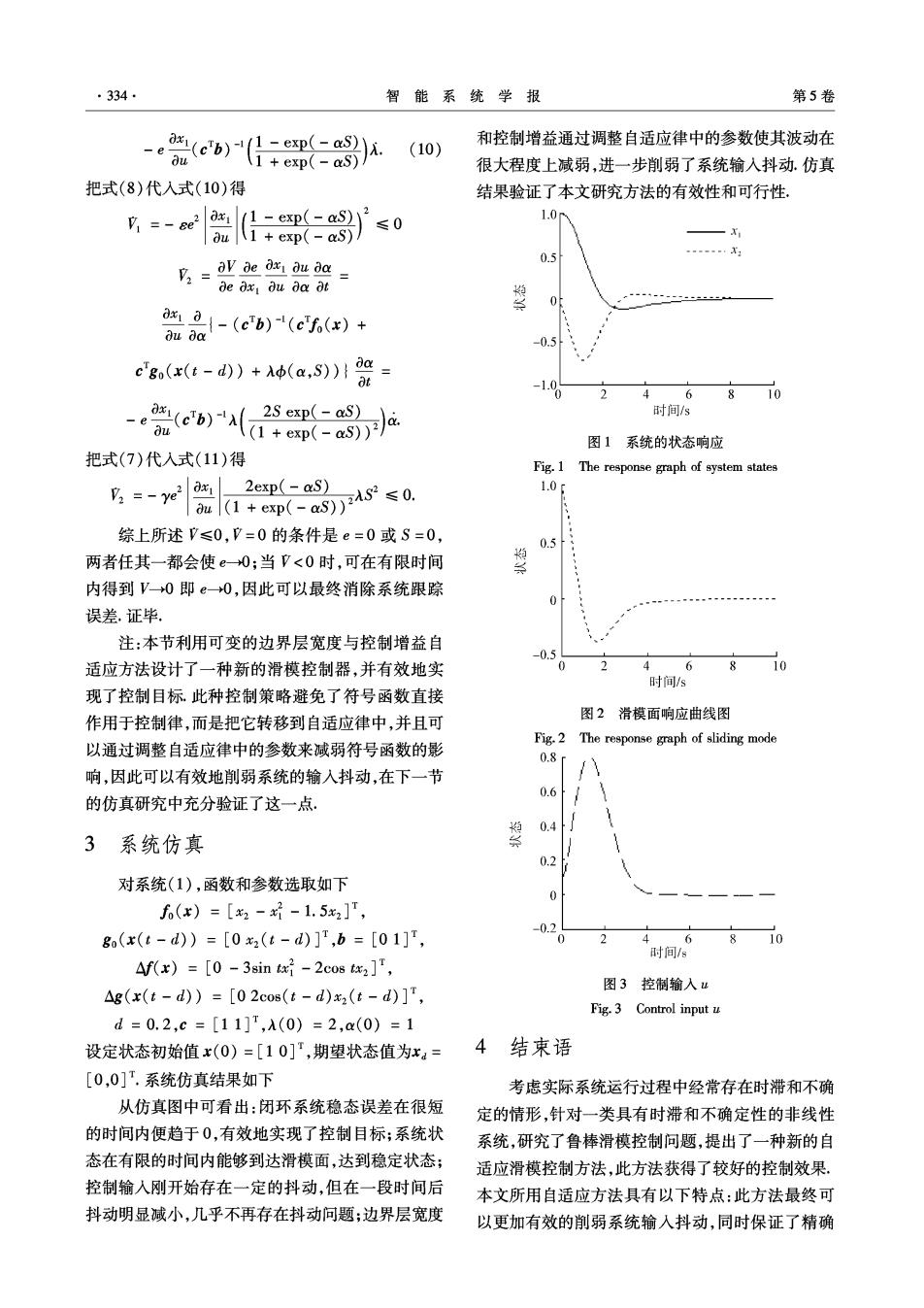
334· 智能系统学报 第5卷 -e (c"b) -exp(-aS)). 和控制增益通过调整自适应律中的参数使其波动在 (10) du 1 exp(-aS) 很大程度上减弱,进一步削弱了系统输入抖动.仿真 把式(8)代入式(10)得 结果验证了本文研究方法的有效性和可行性。 V=-se Oz (1-exp(-as)2 1.0 ≤0 au1 exp(-aS) -X V:av e 0ax au aa 0.5 ---X2 de ox ou da ot a0{-(c'b)(cf(x)+ du dx -0.5 c'go(x(t-d))+d(a.S)) t 1% 46810 -0e62{a 时间/s 图1系统的状态响应 把式(7)代入式(11)得 Fig.1 The response graph of system states 男-aa0 1.0c 综上所述V≤0,V=0的条件是e=0或S=0, 两者任其一都会使e0;当7<0时,可在有限时间 内得到V→0即e0,因此可以最终消除系统跟踪 误差,证毕 注:本节利用可变的边界层宽度与控制增益自 -0.5 适应方法设计了一种新的滑模控制器,并有效地实 0 4 6810 时间/s 现了控制目标此种控制策略避免了符号函数直接 作用于控制律,而是把它转移到自适应律中,并且可 图2滑模面响应曲线图 以通过调整自适应律中的参数来减弱符号函数的影 Fig.2 The response graph of sliding mode 0.8r 响,因此可以有效地削弱系统的输入抖动,在下一节 的仿真研究中充分验证了这一点. 0.4/ 3系统仿真 0.2 对系统(1),函数和参数选取如下 0 f6(x)=[x2--1.5x2]T, -0.2 go(x(t-d))=[0x2(6-d)]T,b=[01]T, 0 4 810 时间s Af(x)=[0-3sin ti-2cos tx2 ] Ag(x(t-d))=[02cos(t-d)x2(t-d)]", 图3控制输入u Fig.3 Control input u d=0.2,c=[11]T,A(0)=2,x(0)=1 设定状态初始值x(0)=[10],期望状态值为xa= 4结束语 [0,0]'.系统仿真结果如下 考虑实际系统运行过程中经常存在时滞和不确 从仿真图中可看出:闭环系统稳态误差在很短 定的情形,针对一类具有时滞和不确定性的非线性 的时间内便趋于0,有效地实现了控制目标;系统状 系统,研究了鲁棒滑模控制问题,提出了一种新的自 态在有限的时间内能够到达滑模面,达到稳定状态; 适应滑模控制方法,此方法获得了较好的控制效果 控制输入刚开始存在一定的抖动,但在一段时间后 本文所用自适应方法具有以下特点:此方法最终可 抖动明显减小,几乎不再存在抖动问题;边界层宽度 以更加有效的削弱系统输入抖动,同时保证了精确