正在加载图片...
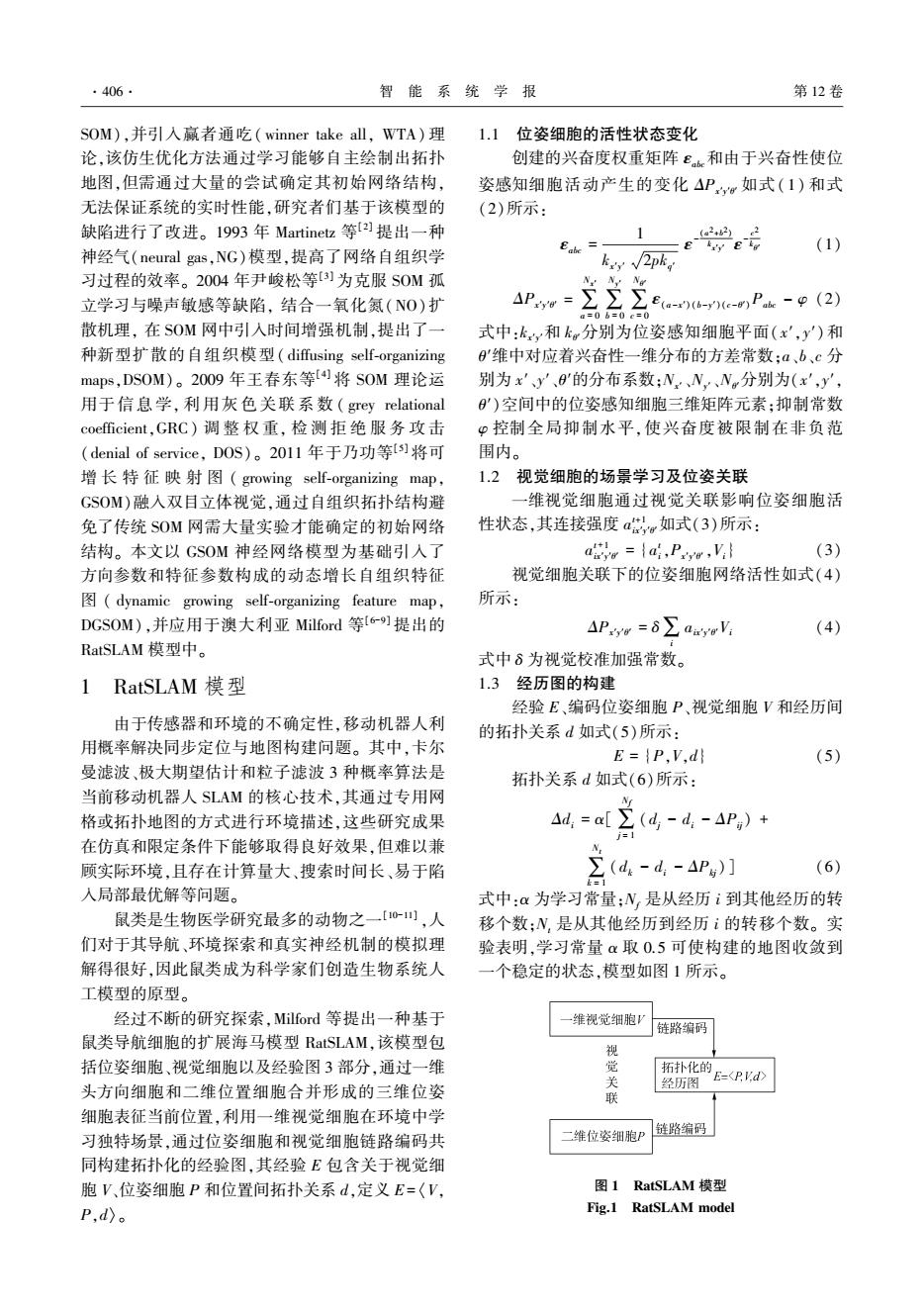
·406· 智能系统学报 第12卷 SOM),并引入赢者通吃(winner take all,.WTA)理 1.1 位姿细胞的活性状态变化 论,该仿生优化方法通过学习能够自主绘制出拓扑 创建的兴奋度权重矩阵ε和由于兴奋性使位 地图,但需通过大量的尝试确定其初始网络结构, 姿感知细胞活动产生的变化APyg如式(1)和式 无法保证系统的实时性能,研究者们基于该模型的 (2)所示: 缺陷进行了改进。1993年Martinetz等2)提出一种 1 (1) 神经气(neural gas,NG)模型,提高了网络自组织学 ky√2pk, 习过程的效率。2004年尹峻松等[)为克服S0M孤 NN Na 立学习与噪声敏感等缺陷,结合一氧化氮(N0)扩 △Pg= 散机理,在SOM网中引入时间增强机制,提出了一 式中:ky和ke分别为位姿感知细胞平面(x',y)和 种新型扩散的自组织模型(diffusing self-.organizing 0'维中对应着兴奋性一维分布的方差常数;a、b、c分 maps,DS0M)。2009年王春东等[4)将S0M理论运 别为x'y'、'的分布系数;N、N,、N分别为(x',y', 用于信息学,利用灰色关联系数(grey relational )空间中的位姿感知细胞三维矩阵元素:抑制常数 coefficient,.GRC)调整权重,检测拒绝服务攻击 ”控制全局抑制水平,使兴奋度被限制在非负范 (denial of service,DOS)。20ll年于乃功等[s]将可 围内。 增长特征映射图(growing self-organizing map, 1.2视觉细胞的场景学习及位姿关联 GSOM)融入双目立体视觉,通过自组织拓扑结构避 ~维视觉细胞通过视觉关联影响位姿细胞活 免了传统SOM网需大量实验才能确定的初始网络 性状态,其连接强度a。如式(3)所示: 结构。本文以GSOM神经网络模型为基础引入了 awy=ai,Pyo,Vi (3) 方向参数和特征参数构成的动态增长自组织特征 视觉细胞关联下的位姿细胞网络活性如式(4) dynamic growing self-organizing feature map, 所示: DGSOM),并应用于澳大利亚Milford等[6]提出的 APyg=δ∑awywVi (4) RatSLAM模型中。 式中δ为视觉校准加强常数。 1 RatSLAM模型 1.3经历图的构建 经验E、编码位姿细胞P、视觉细胞V和经历间 由于传感器和环境的不确定性,移动机器人利 的拓扑关系d如式(5)所示: 用概率解决同步定位与地图构建问题。其中,卡尔 E=P,V,d (5) 曼滤波、极大期望估计和粒子滤波3种概率算法是 拓扑关系d如式(6)所示: 当前移动机器人SLAM的核心技术,其通过专用网 N 格或拓扑地图的方式进行环境描述,这些研究成果 △d:=a[ (d,-d-△P)+ 在仿真和限定条件下能够取得良好效果,但难以兼 顾实际环境,且存在计算量大、搜索时间长、易于陷 三d-4-ar,门 (6)】 入局部最优解等问题。 式中:α为学习常量:N是从经历i到其他经历的转 鼠类是生物医学研究最多的动物之一【10川,人 移个数:N,是从其他经历到经历i的转移个数。实 们对于其导航、环境探索和真实神经机制的模拟理 验表明,学习常量α取0.5可使构建的地图收敛到 解得很好,因此鼠类成为科学家们创造生物系统人 一个稳定的状态,模型如图1所示。 工模型的原型。 经过不断的研究探索,Milford等提出一种基于 维视觉细胞” 链路编码 鼠类导航细胞的扩展海马模型RatSLAM,该模型包 视 括位姿细胞、视觉细胞以及经验图3部分,通过一维 觉 拓扑化的 经历图 E-<PVd 头方向细胞和二维位置细胞合并形成的三维位姿 联 4 细胞表征当前位置,利用一维视觉细胞在环境中学 习独特场景,通过位姿细胞和视觉细胞链路编码共 二维位姿细胞P 链路编码 同构建拓扑化的经验图,其经验E包含关于视觉细 胞V、位姿细胞P和位置间拓扑关系d,定义E=〈V, 图1 RatSLAM模型 P,d)o Fig.1 RatSLAM modelSOM),并引入赢者通吃(winner take all, WTA) 理 论,该仿生优化方法通过学习能够自主绘制出拓扑 地图,但需通过大量的尝试确定其初始网络结构, 无法保证系统的实时性能,研究者们基于该模型的 缺陷进行了改进。 1993 年 Martinetz 等[2] 提出一种 神经气(neural gas,NG)模型,提高了网络自组织学 习过程的效率。 2004 年尹峻松等[3] 为克服 SOM 孤 立学习与噪声敏感等缺陷, 结合一氧化氮(NO)扩 散机理, 在 SOM 网中引入时间增强机制,提出了一 种新型扩散的自组织模型( diffusing self⁃organizing maps,DSOM)。 2009 年王春东等[4] 将 SOM 理论运 用于 信 息 学, 利 用 灰 色 关 联 系 数 ( grey relational coefficient,GRC) 调 整 权 重, 检 测 拒 绝 服 务 攻 击 (denial of service, DOS)。 2011 年于乃功等[5] 将可 增 长 特 征 映 射 图 ( growing self⁃organizing map, GSOM)融入双目立体视觉,通过自组织拓扑结构避 免了传统 SOM 网需大量实验才能确定的初始网络 结构。 本文以 GSOM 神经网络模型为基础引入了 方向参数和特征参数构成的动态增长自组织特征 图 ( dynamic growing self⁃organizing feature map, DGSOM),并应用于澳大利亚 Milford 等[6-9] 提出的 RatSLAM 模型中。 1 RatSLAM 模型 由于传感器和环境的不确定性,移动机器人利 用概率解决同步定位与地图构建问题。 其中,卡尔 曼滤波、极大期望估计和粒子滤波 3 种概率算法是 当前移动机器人 SLAM 的核心技术,其通过专用网 格或拓扑地图的方式进行环境描述,这些研究成果 在仿真和限定条件下能够取得良好效果,但难以兼 顾实际环境,且存在计算量大、搜索时间长、易于陷 入局部最优解等问题。 鼠类是生物医学研究最多的动物之一[10-11] ,人 们对于其导航、环境探索和真实神经机制的模拟理 解得很好,因此鼠类成为科学家们创造生物系统人 工模型的原型。 经过不断的研究探索,Milford 等提出一种基于 鼠类导航细胞的扩展海马模型 RatSLAM,该模型包 括位姿细胞、视觉细胞以及经验图 3 部分,通过一维 头方向细胞和二维位置细胞合并形成的三维位姿 细胞表征当前位置,利用一维视觉细胞在环境中学 习独特场景,通过位姿细胞和视觉细胞链路编码共 同构建拓扑化的经验图,其经验 E 包含关于视觉细 胞 V、位姿细胞 P 和位置间拓扑关系 d,定义 E = 〈V, P,d〉。 1.1 位姿细胞的活性状态变化 创建的兴奋度权重矩阵 εabc和由于兴奋性使位 姿感知细胞活动产生的变化 ΔPx′y′θ′ 如式( 1) 和式 (2)所示: εabc = 1 kx′y′ 2pkq′ ε - (a 2+b 2) k x′y′ ε - c 2 k θ′ (1) ΔPx′y′θ′ = ∑ Nx′ a = 0 ∑ Ny′ b = 0 ∑ Nθ′ c = 0 ε(a-x′)(b-y′)(c-θ′)Pabc - φ (2) 式中:kx′y′和 kθ′分别为位姿感知细胞平面( x′,y′)和 θ′维中对应着兴奋性一维分布的方差常数;a、b、c 分 别为 x′、y′、θ′的分布系数;Nx′、Ny′、Nθ′分别为(x′,y′, θ′)空间中的位姿感知细胞三维矩阵元素;抑制常数 φ 控制全局抑制水平,使兴奋度被限制在非负范 围内。 1.2 视觉细胞的场景学习及位姿关联 一维视觉细胞通过视觉关联影响位姿细胞活 性状态,其连接强度 a t+1 ix′y′θ′如式(3)所示: a t+1 ix′y′θ′ = {a t i,Px′y′θ′,Vi} (3) 视觉细胞关联下的位姿细胞网络活性如式(4) 所示: ΔPx′y′θ′ = δ∑i aix′y′θ′Vi (4) 式中 δ 为视觉校准加强常数。 1.3 经历图的构建 经验 E、编码位姿细胞 P、视觉细胞 V 和经历间 的拓扑关系 d 如式(5)所示: E = {P,V,d} (5) 拓扑关系 d 如式(6)所示: Δdi = α[∑ Nf j = 1 (dj - di - ΔPij) + ∑ Nt k = 1 (dk - di - ΔPkj)] (6) 式中:α 为学习常量;Nf 是从经历 i 到其他经历的转 移个数;Nt 是从其他经历到经历 i 的转移个数。 实 验表明,学习常量 α 取 0.5 可使构建的地图收敛到 一个稳定的状态,模型如图 1 所示。 图 1 RatSLAM 模型 Fig.1 RatSLAM model ·406· 智 能 系 统 学 报 第 12 卷