正在加载图片...
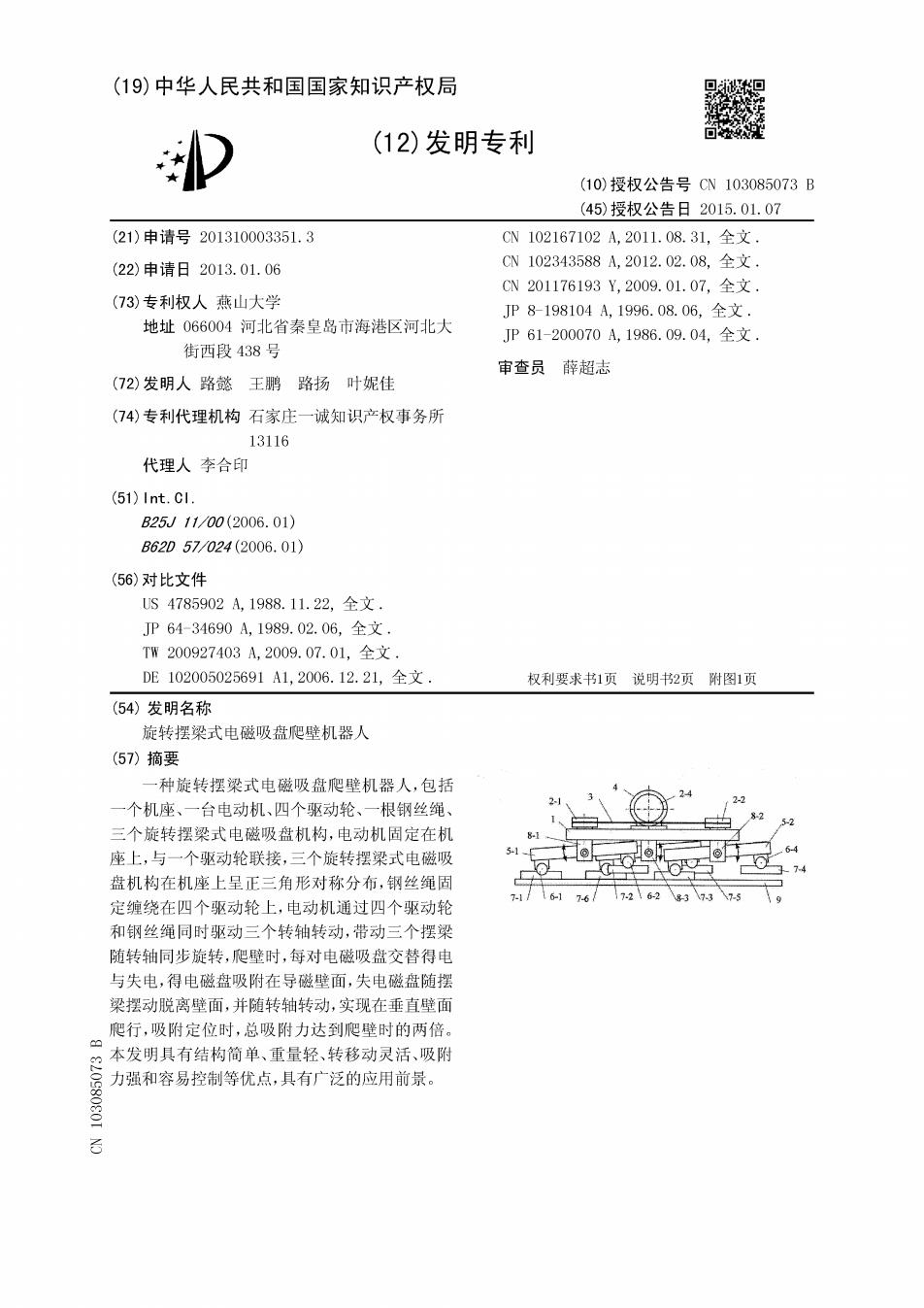
(19)中华人民共和国国家知识产权局 可贤▣ (12)发明专利 ▣A (10)授权公告号CN103085073B (45)授权公告日2015.01.07 (21)申请号201310003351.3 CN102167102A,2011.08.31,全文. (22)申请日2013.01.06 CN102343588A.2012.02.08,全文. CN201176193Y,2009.01.07,全文. (73)专利权人燕山大学 JP8-198104A,1996.08.06,全文. 地址066004河北省秦皇岛市海港区河北大 JP61-200070A,1986.09.04,全文. 街西段438号 审查员薛超志 (72)发明人路懿王鹏路扬叶妮佳 (74)专利代理机构石家庄一诚知识产权事务所 13116 代理人李合印 (51)Int.CI. B25J11/00(2006.01) B62D57024(2006.01) (56)对比文件 US4785902A,1988.11.22,全文. JP64-34690A,1989.02.06,全文, TW200927403A,2009.07.01,全文, DE102005025691A1,2006.12.21,全文, 权利要求书1页说明书2页附图1页 (54)发明名称 旋转摆梁式电磁吸盘爬壁机器人 (57)摘要 一种旋转摆梁式电磁吸盘爬壁机器人,包括 一个机座、一台电动机、四个驱动轮、一根钢丝绳、 三个旋转摆梁式电磁吸盘机构,电动机固定在机 座上,与一个驱动轮联接,三个旋转摆梁式电磁吸 盘机构在机座上呈正三角形对称分布,钢丝绳固 7-116176 7-26-2183737-5 定缠绕在四个驱动轮上,电动机通过四个驱动轮 和钢丝绳同时驱动三个转轴转动,带动三个摆梁 随转轴同步旋转,爬壁时,每对电磁吸盘交替得电 与失电,得电磁盘吸附在导磁壁面,失电磁盘随摆 梁摆动脱离壁面,并随转轴转动,实现在垂直壁面 爬行,吸附定位时,总吸附力达到爬壁时的两倍。 本发明具有结构简单、重量轻、转移动灵活、吸附 力强和容易控制等优点,具有广泛的应用前景