正在加载图片...
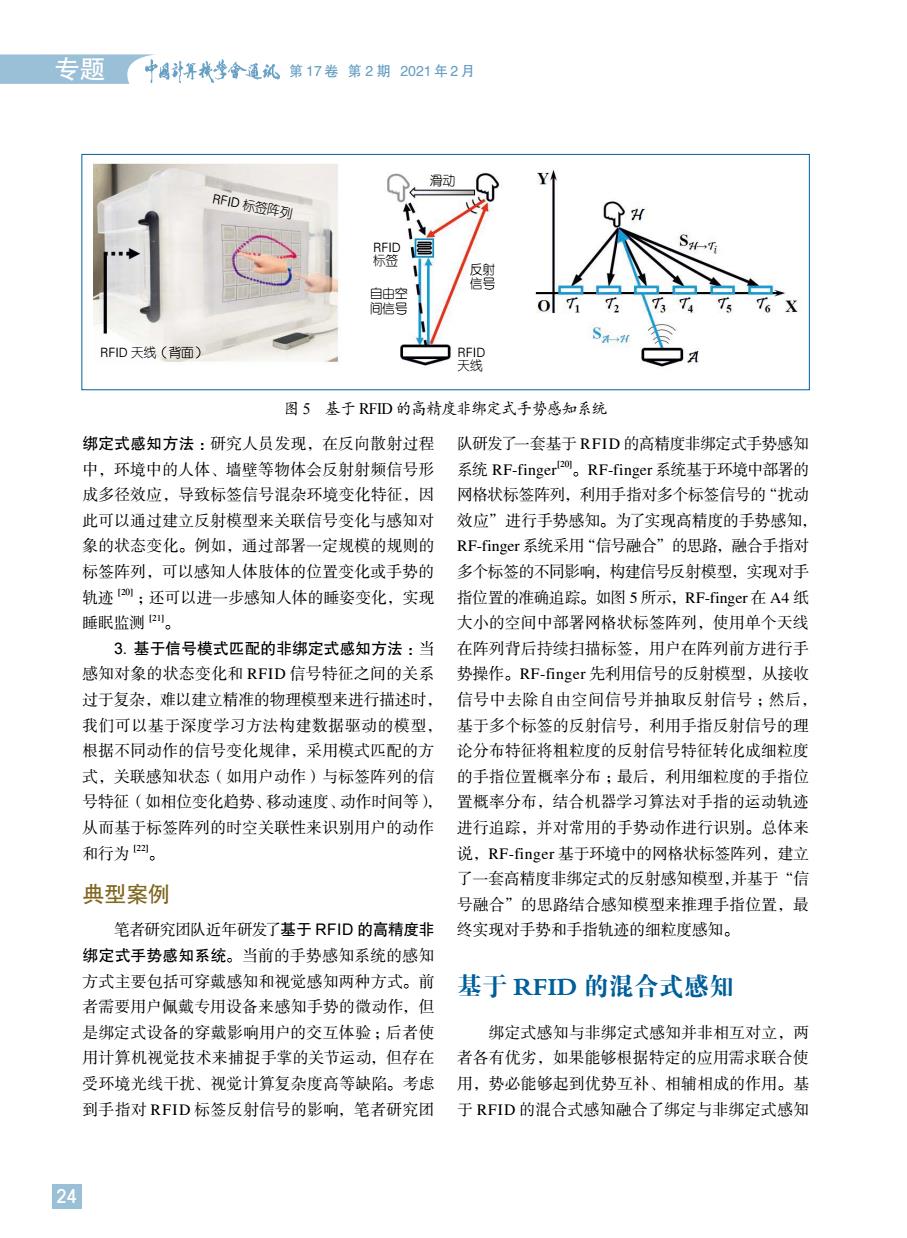
专题中喝计算学食通就第17卷第2期2021年2月 滑动 RFID标签阵列 RFID S 标签 自由空 间信号 76X RFID天线(背面) RFID 天线 图5基于RFD的高精度非绑定式手势感知系统 绑定式感知方法:研究人员发现,在反向散射过程队研发了一套基于RFID的高精度非绑定式手势感知 中,环境中的人体、墙壁等物体会反射射频信号形 系统RF-finger200。RF-finger系统基于环境中部署的 成多径效应,导致标签信号混杂环境变化特征,因网格状标签阵列,利用手指对多个标签信号的“扰动 此可以通过建立反射模型来关联信号变化与感知对 效应”进行手势感知。为了实现高精度的手势感知, 象的状态变化。例如,通过部署一定规模的规则的 RF-finger系统采用“信号融合”的思路,融合手指对 标签阵列,可以感知人体肢体的位置变化或手势的多个标签的不同影响,构建信号反射模型,实现对手 轨迹20;还可以进一步感知人体的睡姿变化,实现指位置的准确追踪。如图5所示,RF-ger在A4纸 睡眠监测2。 大小的空间中部署网格状标签阵列,使用单个天线 3.基于信号模式匹配的非绑定式感知方法:当在阵列背后持续扫描标签,用户在阵列前方进行手 感知对象的状态变化和RFID信号特征之间的关系势操作。RF-iger先利用信号的反射模型,从接收 过于复杂,难以建立精准的物理模型来进行描述时,信号中去除自由空间信号并抽取反射信号;然后, 我们可以基于深度学习方法构建数据驱动的模型,基于多个标签的反射信号,利用手指反射信号的理 根据不同动作的信号变化规律,采用模式匹配的方论分布特征将粗粒度的反射信号特征转化成细粒度 式,关联感知状态(如用户动作)与标签阵列的信的手指位置概率分布:最后,利用细粒度的手指位 号特征(如相位变化趋势、移动速度、动作时间等),置概率分布,结合机器学习算法对手指的运动轨迹 从而基于标签阵列的时空关联性来识别用户的动作 进行追踪,并对常用的手势动作进行识别。总体来 和行为2四。 说,RF-finger基于环境中的网格状标签阵列,建立 了一套高精度非绑定式的反射感知模型,并基于“信 典型案例 号融合”的思路结合感知模型来推理手指位置,最 笔者研究团队近年研发了基于RFID的高精度非 终实现对手势和手指轨迹的细粒度感知。 绑定式手势感知系统。当前的手势感知系统的感知 方式主要包括可穿戴感知和视觉感知两种方式。前 基于RFD的混合式感知 者需要用户佩戴专用设备来感知手势的微动作,但 是绑定式设备的穿戴影响用户的交互体验;后者使 绑定式感知与非绑定式感知并非相互对立,两 用计算机视觉技术来捕捉手掌的关节运动,但存在 者各有优劣,如果能够根据特定的应用需求联合使 受环境光线干扰、视觉计算复杂度高等缺陷。考虑 用,势必能够起到优势互补、相辅相成的作用。基 到手指对RFID标签反射信号的影响,笔者研究团于RFID的混合式感知融合了绑定与非绑定式感知 2424 专题 第 17 卷 第 2 期 2021 年 2 月 绑定式感知方法 :研究人员发现,在反向散射过程 中,环境中的人体、墙壁等物体会反射射频信号形 成多径效应,导致标签信号混杂环境变化特征,因 此可以通过建立反射模型来关联信号变化与感知对 象的状态变化。例如,通过部署一定规模的规则的 标签阵列,可以感知人体肢体的位置变化或手势的 轨迹 [20] ;还可以进一步感知人体的睡姿变化,实现 睡眠监测 [21]。 3. 基于信号模式匹配的非绑定式感知方法 :当 感知对象的状态变化和 RFID 信号特征之间的关系 过于复杂,难以建立精准的物理模型来进行描述时, 我们可以基于深度学习方法构建数据驱动的模型, 根据不同动作的信号变化规律,采用模式匹配的方 式,关联感知状态(如用户动作)与标签阵列的信 号特征(如相位变化趋势、移动速度、动作时间等), 从而基于标签阵列的时空关联性来识别用户的动作 和行为 [22]。 典型案例 笔者研究团队近年研发了基于 RFID 的高精度非 绑定式手势感知系统。当前的手势感知系统的感知 方式主要包括可穿戴感知和视觉感知两种方式。前 者需要用户佩戴专用设备来感知手势的微动作,但 是绑定式设备的穿戴影响用户的交互体验;后者使 用计算机视觉技术来捕捉手掌的关节运动,但存在 受环境光线干扰、视觉计算复杂度高等缺陷。考虑 到手指对 RFID 标签反射信号的影响,笔者研究团 队研发了一套基于 RFID 的高精度非绑定式手势感知 系统 RF-finger[20]。RF-finger 系统基于环境中部署的 网格状标签阵列,利用手指对多个标签信号的“扰动 效应”进行手势感知。为了实现高精度的手势感知, RF-finger 系统采用“信号融合”的思路,融合手指对 多个标签的不同影响,构建信号反射模型,实现对手 指位置的准确追踪。如图 5 所示,RF-finger 在 A4 纸 大小的空间中部署网格状标签阵列,使用单个天线 在阵列背后持续扫描标签,用户在阵列前方进行手 势操作。RF-finger 先利用信号的反射模型,从接收 信号中去除自由空间信号并抽取反射信号 ;然后, 基于多个标签的反射信号,利用手指反射信号的理 论分布特征将粗粒度的反射信号特征转化成细粒度 的手指位置概率分布 ;最后,利用细粒度的手指位 置概率分布,结合机器学习算法对手指的运动轨迹 进行追踪,并对常用的手势动作进行识别。总体来 说,RF-finger 基于环境中的网格状标签阵列,建立 了一套高精度非绑定式的反射感知模型,并基于“信 号融合”的思路结合感知模型来推理手指位置,最 终实现对手势和手指轨迹的细粒度感知。 基于 RFID 的混合式感知 绑定式感知与非绑定式感知并非相互对立,两 者各有优劣,如果能够根据特定的应用需求联合使 用,势必能够起到优势互补、相辅相成的作用。基 于 RFID 的混合式感知融合了绑定与非绑定式感知 图 5 基于 RFID 的高精度非绑定式手势感知系统 RFID 标签 滑动 自由空 间信号 反射 信号 RFID 天线 RFID 标签阵列 RFID 天线(背面)