正在加载图片...
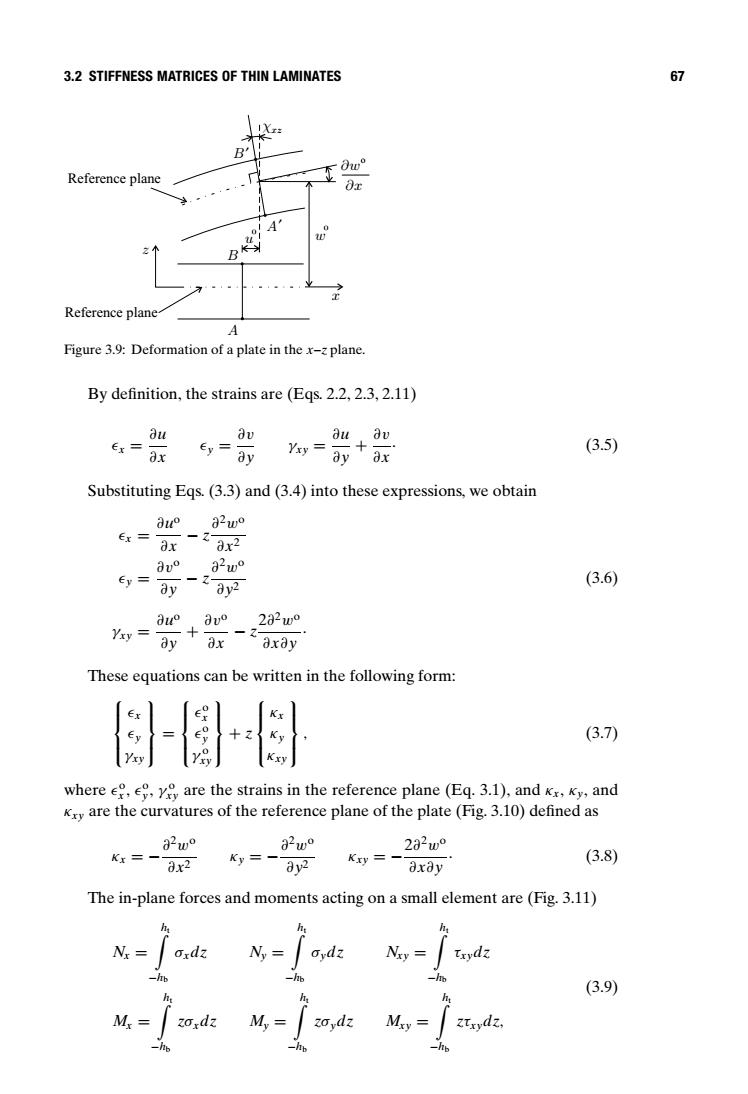
3.2 STIFFNESS MATRICES OF THIN LAMINATES 67 Reference plane Reference plane A Figure 3.9:Deformation of a plate in the x-z plane. By definition,the strains are(Egs.2.2,2.3,2.11) au av Ex= Ey= Yxy (3.5) ax ay ay Substituting Egs.(3.3)and (3.4)into these expressions,we obtain 0u002w° Er= -Z- ax ax2 8u0 02w° Ey= -7- (3.6) ay 8y2 au°8v°282w0 Yxy= -Z ay dx axav These equations can be written in the following form: (3.7) where e,e,y are the strains in the reference plane (Eq.3.1),and Kr,Ky,and Kry are the curvatures of the reference plane of the plate (Fig.3.10)defined as 82w0 82w0 282w° Kx=- Ky三一 Kxy=一 (3.8) 8x2 ay2 axay The in-plane forces and moments acting on a small element are (Fig.3.11) h h Nt= Oxdz Ny ovdz Nxy Txydz -hb (3.9) h M M,=3.2 STIFFNESS MATRICES OF THIN LAMINATES 67 x z B A u w χxz Reference plane Reference plane x w ∂ ∂ o A′ B′ Figure 3.9: Deformation of a plate in the x–z plane. By definition, the strains are (Eqs. 2.2, 2.3, 2.11) x = ∂u ∂x y = ∂v ∂y γxy = ∂u ∂y + ∂v ∂x . (3.5) Substituting Eqs. (3.3) and (3.4) into these expressions, we obtain x = ∂uo ∂x − z ∂2wo ∂x2 y = ∂vo ∂y − z ∂2wo ∂y2 (3.6) γxy = ∂uo ∂y + ∂vo ∂x − z 2∂2wo ∂x∂y . These equations can be written in the following form: x y γxy = o x o y γ o xy + z κx κy κxy , (3.7) where o x , o y , γ o xy are the strains in the reference plane (Eq. 3.1), and κx, κy, and κxy are the curvatures of the reference plane of the plate (Fig. 3.10) defined as κx = −∂2wo ∂x2 κy = −∂2wo ∂y2 κxy = −2∂2wo ∂x∂y . (3.8) The in-plane forces and moments acting on a small element are (Fig. 3.11) Nx = ) ht −hb σxdz Ny = ) ht −hb σydz Nxy = ) ht −hb τxydz Mx = ) ht −hb zσxdz My = ) ht −hb zσydz Mxy = ) ht −hb zτxydz, (3.9)