正在加载图片...
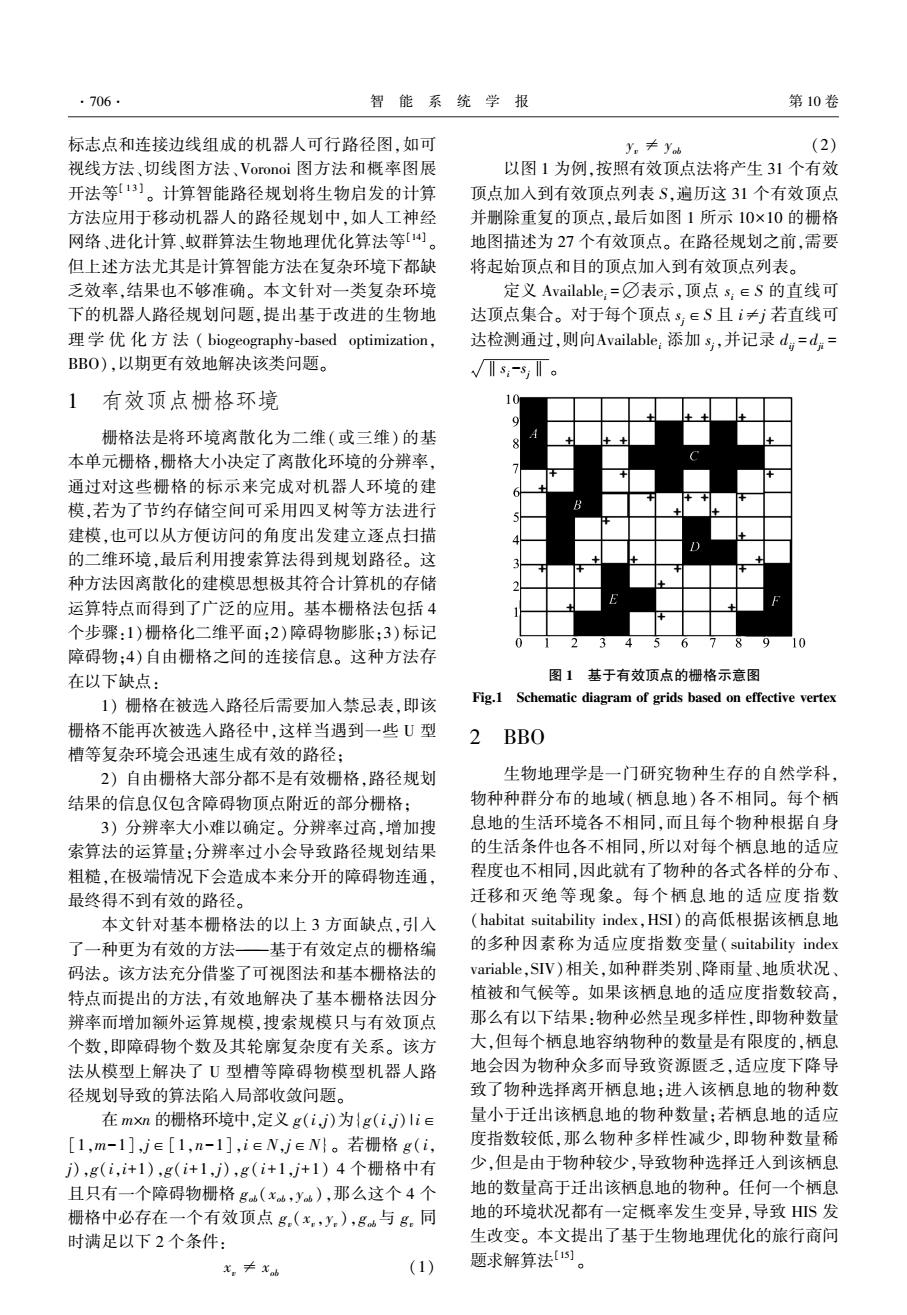
·706 智能系统学报 第10卷 标志点和连接边线组成的机器人可行路径图,如可 y,≠yb (2) 视线方法、切线图方法、Voronoi图方法和概率图展 以图1为例,按照有效顶点法将产生31个有效 开法等13]。计算智能路径规划将生物启发的计算 顶点加入到有效顶点列表S,遍历这31个有效顶点 方法应用于移动机器人的路径规划中,如人工神经 并删除重复的顶点,最后如图1所示10×10的栅格 网络、进化计算、蚁群算法生物地理优化算法等。 地图描述为27个有效顶点。在路径规划之前,需要 但上述方法尤其是计算智能方法在复杂环境下都缺 将起始顶点和目的顶点加入到有效顶点列表。 乏效率,结果也不够准确。本文针对一类复杂环境 定义Available,=☑表示,顶点s:∈S的直线可 下的机器人路径规划问题,提出基于改进的生物地 达顶点集合。对于每个顶点s∈S且i≠若直线可 理学优化方法(biogeography--based optimization, 达检测通过,则向Available:添加s,并记录d=da= BB0),以期更有效地解决该类问题。 √s:-s‖。 1有效顶点栅格环境 栅格法是将环境离散化为二维(或三维)的基 本单元栅格,栅格大小决定了离散化环境的分辨率, 通过对这些栅格的标示来完成对机器人环境的建 模,若为了节约存储空间可采用四叉树等方法进行 B 建模,也可以从方便访问的角度出发建立逐点扫描 的二维环境,最后利用搜索算法得到规划路径。这 种方法因离散化的建模思想极其符合计算机的存储 运算特点而得到了广泛的应用。基本栅格法包括4 个步骤:1)栅格化二维平面:2)障碍物膨胀:3)标记 9 10 障碍物:4)自由栅格之间的连接信息。这种方法存 在以下缺点: 图1基于有效顶点的栅格示意图 1)栅格在被选入路径后需要加入禁忌表,即该 Fig.1 Schematic diagram of grids based on effective vertex 栅格不能再次被选入路径中,这样当遇到一些U型 2 BBO 槽等复杂环境会迅速生成有效的路径: 2)自由栅格大部分都不是有效栅格,路径规划 生物地理学是一门研究物种生存的自然学科, 结果的信息仅包含障碍物顶点附近的部分栅格: 物种种群分布的地域(栖息地)各不相同。每个栖 3)分辨率大小难以确定。分辨率过高,增加搜 息地的生活环境各不相同,而且每个物种根据自身 索算法的运算量:分辨率过小会导致路径规划结果 的生活条件也各不相同,所以对每个栖息地的适应 粗糙,在极端情况下会造成本来分开的障碍物连通, 程度也不相同,因此就有了物种的各式各样的分布、 最终得不到有效的路径。 迁移和灭绝等现象。每个栖息地的适应度指数 本文针对基本栅格法的以上3方面缺点,引入 (habitat suitability index,HSI)的高低根据该栖息地 了一种更为有效的方法一基于有效定点的栅格编 的多种因素称为适应度指数变量(suitability index 码法。该方法充分借鉴了可视图法和基本栅格法的 variable,SIV)相关,如种群类别、降雨量、地质状况、 特点而提出的方法,有效地解决了基本栅格法因分 植被和气候等。如果该栖息地的适应度指数较高, 辨率而增加额外运算规模,搜索规模只与有效顶点 那么有以下结果:物种必然呈现多样性,即物种数量 个数,即障碍物个数及其轮廓复杂度有关系。该方 大,但每个栖息地容纳物种的数量是有限度的,栖息 法从模型上解决了U型槽等障碍物模型机器人路 地会因为物种众多而导致资源匮乏,适应度下降导 径规划导致的算法陷入局部收敛问题。 致了物种选择离开栖息地:进入该栖息地的物种数 在mxn的栅格环境中,定义g(i,j)为{g(i,j)li∈ 量小于迁出该栖息地的物种数量:若栖息地的适应 [1,m-1],je[1,n-1],ieN,jeN}。若栅格g(i, 度指数较低,那么物种多样性减少,即物种数量稀 ),g(i,+1),g(i+1,),g(i+1,j+1)4个栅格中有 少,但是由于物种较少,导致物种选择迁入到该栖息 且只有一个障碍物栅格g(xb,yb),那么这个4个 地的数量高于迁出该栖息地的物种。任何一个栖息 栅格中必存在一个有效顶点g(x,y.),8与g.同 地的环境状况都有一定概率发生变异,导致HS发 时满足以下2个条件: 生改变。本文提出了基于生物地理优化的旅行商问 x。≠xb (1) 题求解算法[]。标志点和连接边线组成的机器人可行路径图,如可 视线方法、切线图方法、Voronoi 图方法和概率图展 开法等[ 1 3 ] 。 计算智能路径规划将生物启发的计算 方法应用于移动机器人的路径规划中,如人工神经 网络、进化计算、蚁群算法生物地理优化算法等[14] 。 但上述方法尤其是计算智能方法在复杂环境下都缺 乏效率,结果也不够准确。 本文针对一类复杂环境 下的机器人路径规划问题,提出基于改进的生物地 理 学 优 化 方 法 ( biogeography⁃based optimization, BBO),以期更有效地解决该类问题。 1 有效顶点栅格环境 栅格法是将环境离散化为二维(或三维) 的基 本单元栅格,栅格大小决定了离散化环境的分辨率, 通过对这些栅格的标示来完成对机器人环境的建 模,若为了节约存储空间可采用四叉树等方法进行 建模,也可以从方便访问的角度出发建立逐点扫描 的二维环境,最后利用搜索算法得到规划路径。 这 种方法因离散化的建模思想极其符合计算机的存储 运算特点而得到了广泛的应用。 基本栅格法包括 4 个步骤:1)栅格化二维平面;2)障碍物膨胀;3)标记 障碍物;4)自由栅格之间的连接信息。 这种方法存 在以下缺点: 1) 栅格在被选入路径后需要加入禁忌表,即该 栅格不能再次被选入路径中,这样当遇到一些 U 型 槽等复杂环境会迅速生成有效的路径; 2) 自由栅格大部分都不是有效栅格,路径规划 结果的信息仅包含障碍物顶点附近的部分栅格; 3) 分辨率大小难以确定。 分辨率过高,增加搜 索算法的运算量;分辨率过小会导致路径规划结果 粗糙,在极端情况下会造成本来分开的障碍物连通, 最终得不到有效的路径。 本文针对基本栅格法的以上 3 方面缺点,引入 了一种更为有效的方法———基于有效定点的栅格编 码法。 该方法充分借鉴了可视图法和基本栅格法的 特点而提出的方法,有效地解决了基本栅格法因分 辨率而增加额外运算规模,搜索规模只与有效顶点 个数,即障碍物个数及其轮廓复杂度有关系。 该方 法从模型上解决了 U 型槽等障碍物模型机器人路 径规划导致的算法陷入局部收敛问题。 在 m×n 的栅格环境中,定义 g(i,j)为{g(i,j) |i∈ [1,m-1],j∈[1,n-1],i∈N,j∈N}。 若栅格 g( i, j),g(i,i+1),g(i+1,j),g( i+1,j+1) 4 个栅格中有 且只有一个障碍物栅格 gob( xob,yob),那么这个 4 个 栅格中必存在一个有效顶点 gv( xv,yv ),gob与 gv 同 时满足以下 2 个条件: xv ≠ xob (1) yv ≠ yob (2) 以图 1 为例,按照有效顶点法将产生 31 个有效 顶点加入到有效顶点列表 S,遍历这 31 个有效顶点 并删除重复的顶点,最后如图 1 所示 10×10 的栅格 地图描述为 27 个有效顶点。 在路径规划之前,需要 将起始顶点和目的顶点加入到有效顶点列表。 定义 Availablei = ∅表示,顶点 si ∈S 的直线可 达顶点集合。 对于每个顶点 sj∈S 且 i≠j 若直线可 达检测通过,则向Availablei 添加 sj,并记录 dij = dji = ‖si -sj‖。 图 1 基于有效顶点的栅格示意图 Fig.1 Schematic diagram of grids based on effective vertex 2 BBO 生物地理学是一门研究物种生存的自然学科, 物种种群分布的地域(栖息地) 各不相同。 每个栖 息地的生活环境各不相同,而且每个物种根据自身 的生活条件也各不相同,所以对每个栖息地的适应 程度也不相同,因此就有了物种的各式各样的分布、 迁移和灭绝等现象。 每个栖息地的适应度指数 (habitat suitability index,HSI)的高低根据该栖息地 的多种因素称为适应度指数变量( suitability index variable,SIV)相关,如种群类别、降雨量、地质状况、 植被和气候等。 如果该栖息地的适应度指数较高, 那么有以下结果:物种必然呈现多样性,即物种数量 大,但每个栖息地容纳物种的数量是有限度的,栖息 地会因为物种众多而导致资源匮乏,适应度下降导 致了物种选择离开栖息地;进入该栖息地的物种数 量小于迁出该栖息地的物种数量;若栖息地的适应 度指数较低,那么物种多样性减少,即物种数量稀 少,但是由于物种较少,导致物种选择迁入到该栖息 地的数量高于迁出该栖息地的物种。 任何一个栖息 地的环境状况都有一定概率发生变异,导致 HIS 发 生改变。 本文提出了基于生物地理优化的旅行商问 题求解算法[15] 。 ·706· 智 能 系 统 学 报 第 10 卷