正在加载图片...
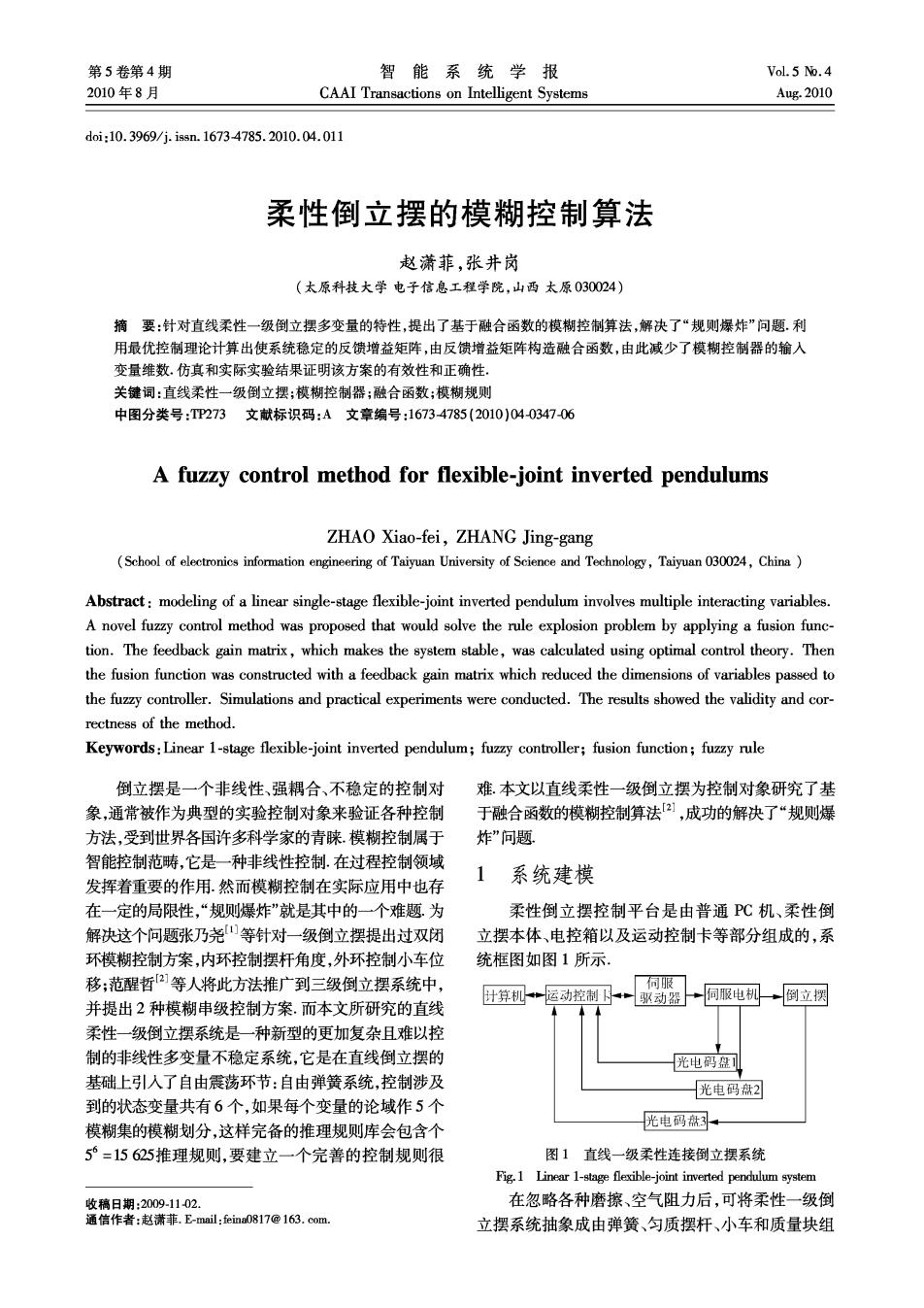
第5卷第4期 智能系统学报 Vol.5 No.4 2010年8月 CAAI Transactions on Intelligent Systems Aug.2010 doi:10.3969/i.issn.1673-4785.2010.04.011 柔性倒立摆的模糊控制算法 赵潇菲,张井岗 (太原科技大学电子信息工程学院,山西太原030024) 摘要:针对直线柔性一级倒立摆多变量的特性,提出了基于融合函数的模糊控制算法,解决了“规则爆炸”问题.利 用最优控制理论计算出使系统稳定的反馈增益矩阵,由反馈增益矩阵构造融合函数,由此减少了模糊控制器的输入 变量维数.仿真和实际实验结果证明该方案的有效性和正确性: 关键词:直线柔性一级倒立摆;模糊控制器;融合函数;模糊规则 中图分类号:1P273文献标识码:A文章编号:1673-4785(2010)040347-06 A fuzzy control method for flexible-joint inverted pendulums ZHAO Xiao-fei,ZHANG Jing-gang (School of electronics information engineering of Taiyuan University of Science and Technology,Taiyuan 030024,China Abstract:modeling of a linear single-stage flexible-joint inverted pendulum involves multiple interacting variables A novel fuzzy control method was proposed that would solve the rule explosion problem by applying a fusion func- tion.The feedback gain matrix,which makes the system stable,was calculated using optimal control theory.Then the fusion function was constructed with a feedback gain matrix which reduced the dimensions of variables passed to the fuzzy controller.Simulations and practical experiments were conducted.The results showed the validity and cor- rectness of the method. Keywords:Linear 1-stage flexible-joint inverted pendulum;fuzzy controller;fusion function;fuzzy rule 倒立摆是一个非线性、强耦合、不稳定的控制对 难.本文以直线柔性一级倒立摆为控制对象研究了基 象,通常被作为典型的实验控制对象来验证各种控制 于融合函数的模糊控制算法2],成功的解决了“规则爆 方法,受到世界各国许多科学家的青睐.模糊控制属于 炸”问题 智能控制范畴,它是一种非线性控制.在过程控制领域 1 发挥着重要的作用.然而模糊控制在实际应用中也存 系统建模 在一定的局限性,“规则爆炸”就是其中的一个难题为 柔性倒立摆控制平台是由普通P℃机、柔性倒 解决这个问题张乃尧等针对一级倒立摆提出过双闭 立摆本体、电控箱以及运动控制卡等部分组成的,系 环模糊控制方案,内环控制摆杆角度,外环控制小车位 统框图如图1所示。 移;范醒哲2]等人将此方法推广到三级倒立摆系统中, 伺吸 计算机运动控制一驭动器→同服电机→倒立摆 并提出2种模糊串级控制方案.而本文所研究的直线 柔性一级倒立摆系统是一种新型的更加复杂且难以控 制的非线性多变量不稳定系统,它是在直线倒立摆的 光电码盘 基础上引入了自由震荡环节:自由弹簧系统,控制涉及 光电码盘2 到的状态变量共有6个,如果每个变量的论域作5个 模糊集的模糊划分,这样完备的推理规则库会包含个 光电码盘3 5=15625推理规则,要建立一个完善的控制规则很 图1直线一级柔性连接倒立摆系统 Fig.1 Linear 1-stage flexible-joint inverted pendulum system 收稿日期:2009-1102. 在忽略各种磨擦、空气阻力后,可将柔性一级倒 通信作者:赵潇菲.E-mail:fein0817@163.com. 立摆系统抽象成由弹簧、匀质摆杆、小车和质量块组