正在加载图片...
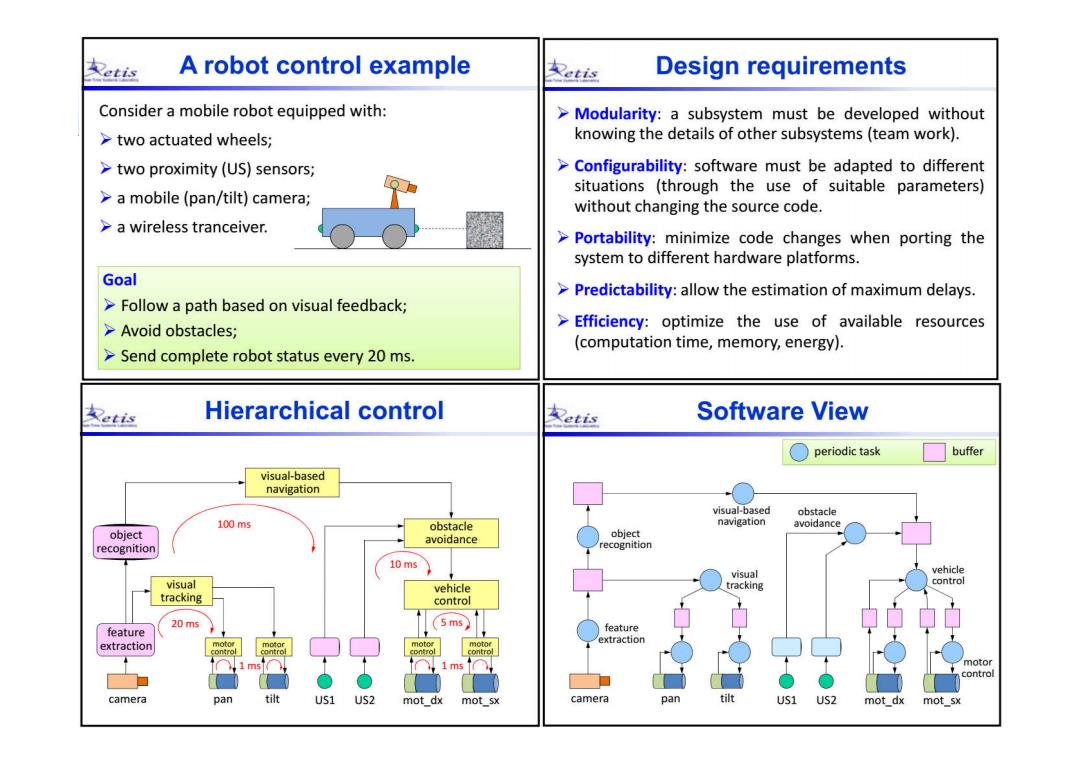
Retis A robot control example 灾etis Design requirements Consider a mobile robot equipped with: >Modularity:a subsystem must be developed without >two actuated wheels; knowing the details of other subsystems(team work). >two proximity (US)sensors; >Configurability:software must be adapted to different situations (through the use of suitable parameters) >a mobile(pan/tilt)camera; without changing the source code. >a wireless tranceiver. >Portability:minimize code changes when porting the system to different hardware platforms. Goal >Predictability:allow the estimation of maximum delays. >Follow a path based on visual feedback; >Avoid obstacles; >Efficiency:optimize the use of available resources (computation time,memory,energy). >Send complete robot status every 20 ms. 家ets Hierarchical control 安etis Software View periodic task buffer visual-based navigation visual-based obstacle 100ms obstacle navigation avoidance object avoidance object recognition recognition 10 ms visual vehicle visual control vehicle tracking tracking control 20m5 (5ms) feature feature extraction extraction motor control camera pan tilt US1 US2 mot_dx camera pan tilt US1 US2 mot dx mot_sx