正在加载图片...
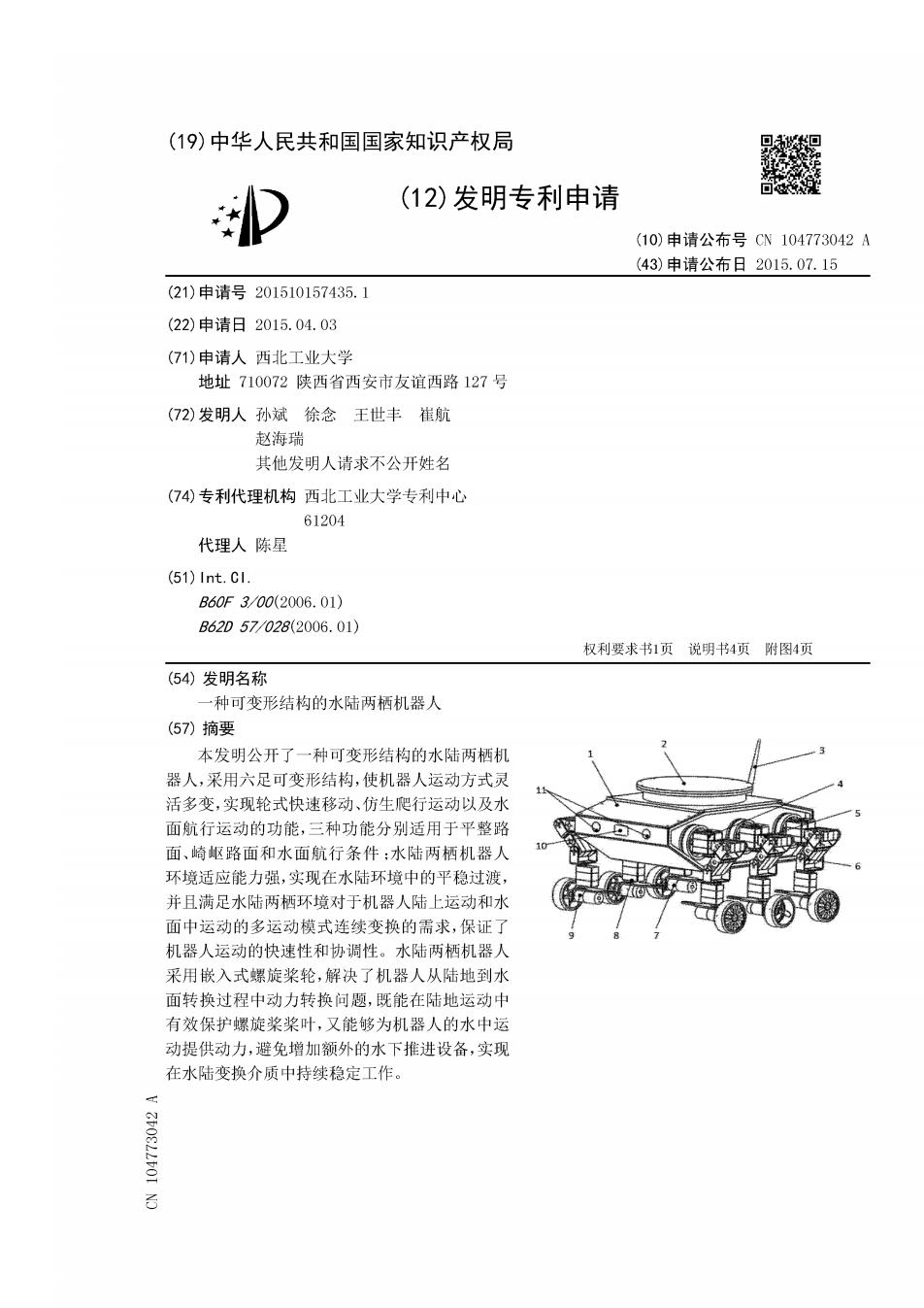
(19)中华人民共和国国家知识产权局 回▣ (12)发明专利申请 (10)申请公布号CN104773042A (43)申请公布日2015.07.15 (21)申请号201510157435.1 (22)申请日2015.04.03 (71)申请人西北工业大学 地址710072陕西省西安市友谊西路127号 (72)发明人孙斌徐念王世丰崔航 赵海瑞 其他发明人请求不公开姓名 (74)专利代理机构西北工业大学专利中心 61204 代理人陈星 (51)nt.Cl. B60F3/00(2006.01) B62D57028(2006.01) 权利要求书1页说明书4页附图4页 (54)发明名称 “种可变形结构的水陆两栖机器人 (57)摘要 本发明公开了一种可变形结构的水陆两栖机 器人,采用六足可变形结构,使机器人运动方式灵 活多变,实现轮式快速移动、仿生爬行运动以及水 面航行运动的功能,三种功能分别适用于平整路 面、崎岖路面和水面航行条件:水陆两栖机器人 环境适应能力强,实现在水陆环境中的平稳过渡, 并且满足水陆两栖环境对于机器人陆上运动和水 面中运动的多运动模式连续变换的需求,保证了 机器人运动的快速性和协调性。水陆两栖机器人 采用嵌入式螺旋桨轮,解决了机器人从陆地到水 面转换过程中动力转换问题,既能在陆地运动中 有效保护螺旋桨桨叶,又能够为机器人的水中运 动提供动力,避免增加额外的水下推进设备,实现 在水陆变换介质中持续稳定工作。 750922250 石