正在加载图片...
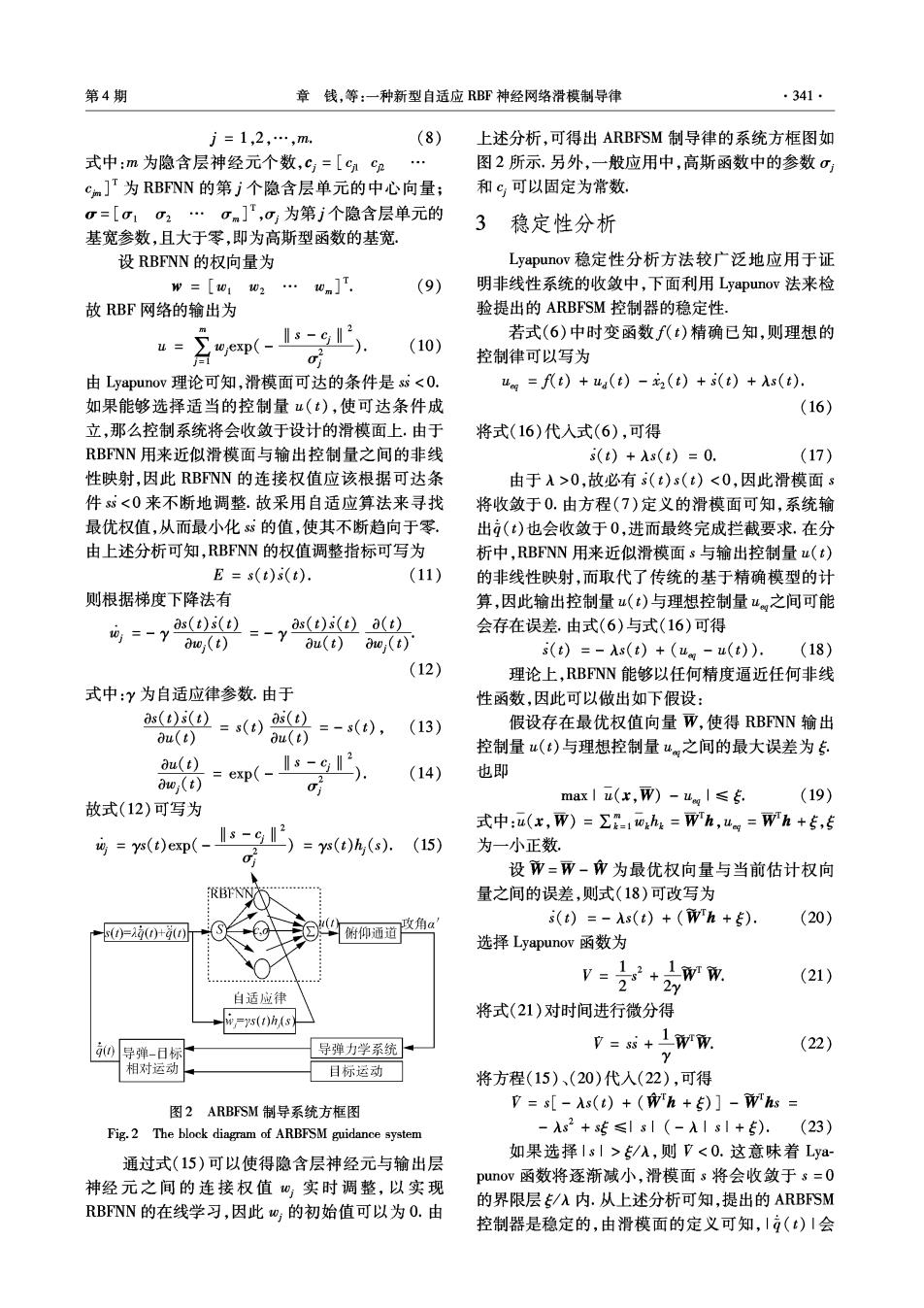
第4期 章钱,等:一种新型自适应RBF神经网络滑模制导律 ·341· j=1,2,…,m (8) 上述分析,可得出ARBFSM制导律的系统方框图如 式中:m为隐含层神经元个数,c;=[ccn 图2所示.另外,一般应用中,高斯函数中的参数σ c]T为RBFNN的第j个隐含层单元的中心向量; 和c,可以固定为常数, 0=[σ102…0m],0为第j个隐含层单元的 3稳定性分析 基宽参数,且大于零,即为高斯型函数的基宽 设RBFNN的权向量为 Lyapunov稳定性分析方法较广泛地应用于证 w=[0102 …0n] (9) 明非线性系统的收敛中,下面利用Lyapunov法来检 故RBF网络的输出为 验提出的ARBFSM控制器的稳定性, 4=w,ep(--9). 若式(6)中时变函数f(t)精确已知,则理想的 (10) 控制律可以写为 由Lyapunov理论可知,滑模面可达的条件是ss<O. uag =f(t)+ua(t)-2(t)+s(t)+As(t). 如果能够选择适当的控制量u(t),使可达条件成 (16) 立,那么控制系统将会收敛于设计的滑模面上.由于 将式(16)代入式(6),可得 RBFNN用来近似滑模面与输出控制量之间的非线 s(t)+As(t)=0. (17) 性映射,因此RBFNN的连接权值应该根据可达条 由于入>0,故必有s(t)s(t)<0,因此滑模面s 件s“<0来不断地调整.故采用自适应算法来寻找 将收敛于0.由方程(7)定义的滑模面可知,系统输 最优权值,从而最小化$的值,使其不断趋向于零. 出(t)也会收敛于0,进而最终完成拦截要求.在分 由上述分析可知,RBFNN的权值调整指标可写为 析中,RBFNN用来近似滑模面s与输出控制量u(t) E=s(t)s(t). (11) 的非线性映射,而取代了传统的基于精确模型的计 则根据梯度下降法有 算,因此输出控制量u(t)与理想控制量“之间可能 4=-yas9=-yas909 会存在误差.由式(6)与式(16)可得 0o,(t) au(t)o;(t) s(t)=-As(t)+(uo -u(t)). (18) (12) 理论上,RBFNN能够以任何精度逼近任何非线 式中:y为自适应律参数.由于 性函数,因此可以做出如下假设: as()()=()( =-s(t), (13) 假设存在最优权值向量W,使得RBNN输出 0u(t) au(t) 控制量u(t)与理想控制量uw之间的最大误差为 au(t) aw;(t) =exp(-s=9. (14) 也即 max|u(x,W)-ug|≤5 (19) 故式(12)可写为 号=50ep(-s-5)=04. 式中:u(x,W)=∑-1whk=Wh,ug=Wh+专,专 (15) 为一小正数 设W=W-巾为最优权向量与当前估计权向 量之间的误差,则式(18)可改写为 攻角c s(t)=-As(t)+(h+专). (20) ()=AG()+(t) 俯仰通道 选择Lyapunov函数为 v-2+ (21) 自适应律 w=ys(t)hAs} 将式(21)对时间进行微分得 )导弹-日标 导弹力学系统 p=s对+1mm. (22) 相对运动 目标运动 将方程(15)、(20)代人(22),可得 图2 ARBFSM制导系统方框图 V=s[-As(t)+(rh+)]-s= Fig.2 The block diagram of ARBFSM guidance system -As2+s装≤1s1(-A1s1+).(23) 如果选择|s|>/入,则V<0.这意味着Lya 通过式(15)可以使得隐含层神经元与输出层 punov函数将逐渐减小,滑模面s将会收敛于s=O 神经元之间的连接权值w实时调整,以实现 的界限层/入内.从上述分析可知,提出的ARBFSM RBFNN的在线学习,因此,的初始值可以为O.由 控制器是稳定的,由滑模面的定义可知,I(t)I会