正在加载图片...
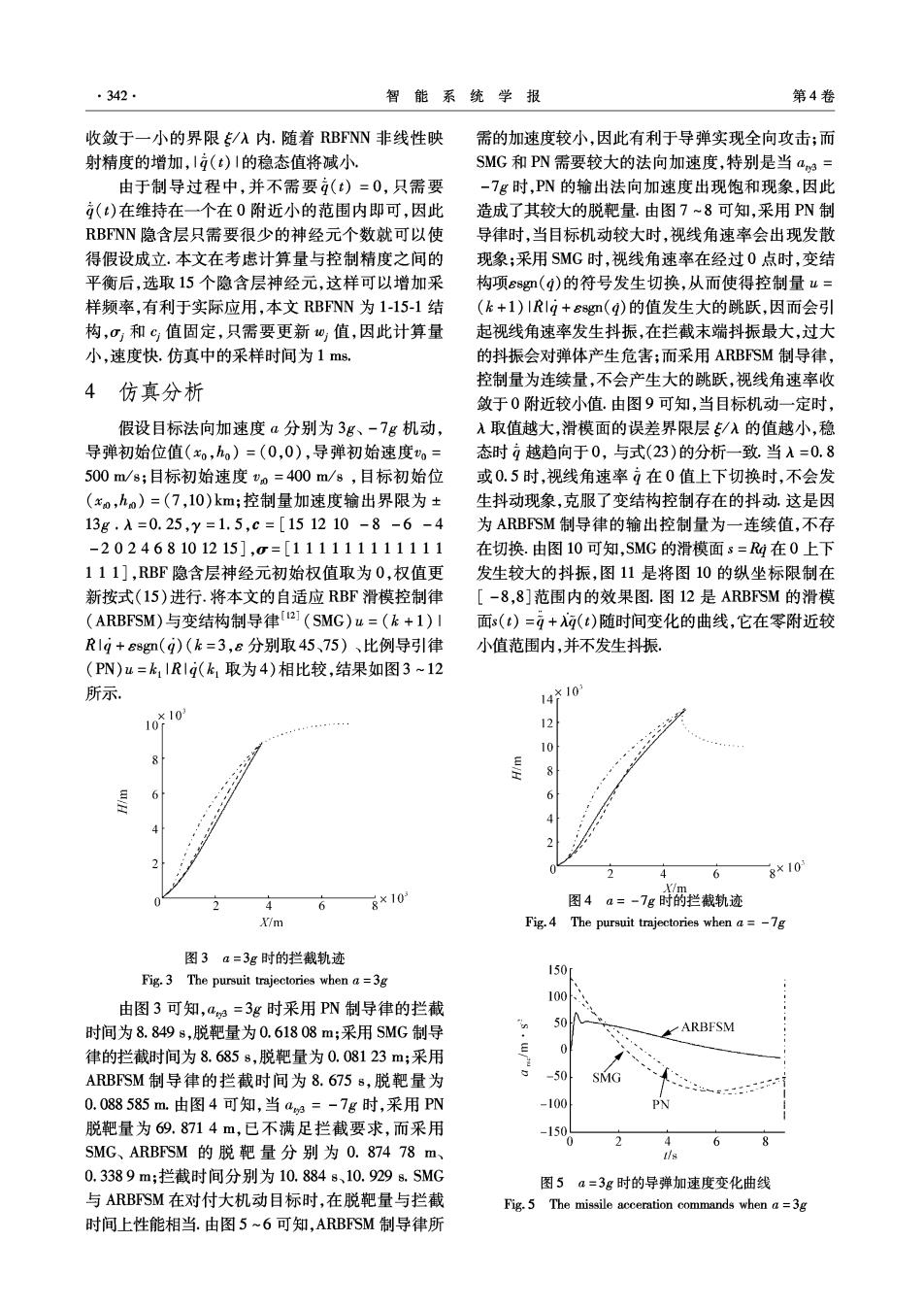
342. 智能系统学报 第4卷 收敛于一小的界限/入内.随着RBFNN非线性映 需的加速度较小,因此有利于导弹实现全向攻击;而 射精度的增加,I(t)1的稳态值将减小 SMG和PN需要较大的法向加速度,特别是当a3= 由于制导过程中,并不需要(t)=0,只需要 -7g时,PN的输出法向加速度出现饱和现象,因此 ()在维持在一个在0附近小的范围内即可,因此 造成了其较大的脱靶量.由图7~8可知,采用PN制 RBFNN隐含层只需要很少的神经元个数就可以使 导律时,当目标机动较大时,视线角速率会出现发散 得假设成立.本文在考虑计算量与控制精度之间的 现象;采用SMG时,视线角速率在经过0点时,变结 平衡后,选取15个隐含层神经元,这样可以增加采 构项εsg(q)的符号发生切换,从而使得控制量w= 样频率,有利于实际应用,本文RBFNN为1-15-1结 (k+1)川R19+6g(q)的值发生大的跳跃,因而会引 构,σ和℃值固定,只需要更新0值,因此计算量 起视线角速率发生抖振,在拦截末端抖振最大,过大 小,速度快.仿真中的采样时间为1ms. 的抖振会对弹体产生危害;而采用ARBFSM制导律, 4 仿真分析 控制量为连续量,不会产生大的跳跃,视线角速率收 敛于0附近较小值.由图9可知,当目标机动一定时, 假设目标法向加速度a分别为3g、-7g机动, 入取值越大,滑模面的误差界限层/入的值越小,稳 导弹初始位值(o,h)=(0,0),导弹初始速度o= 态时越趋向于0,与式(23)的分析一致.当入=0.8 500m/s;目标初始速度vo=400m/s,目标初始位 或0.5时,视线角速率在0值上下切换时,不会发 (xo,ho)=(7,l0)km;控制量加速度输出界限为± 生抖动现象,克服了变结构控制存在的抖动.这是因 13g.入=0.25,y=1.5,c=[151210-8-6-4 为ARBFSM制导律的输出控制量为一连续值,不存 -202468101215],0=[111111111111 在切换.由图10可知,SMG的滑模面s=R4在0上下 111],RBF隐含层神经元初始权值取为0,权值更 发生较大的抖振,图11是将图10的纵坐标限制在 新按式(15)进行.将本文的自适应RBF滑模控制律 [-8,8]范围内的效果图.图12是ARBFSM的滑模 (ARBFSM)与变结构制导律2I(SMG)u=(k+1)I 面s(t)=g+()随时间变化的曲线,它在零附近较 R1g+88g(9)(k=3,8分别取45、75)、比例导引律 小值范围内,并不发生抖振 (PN)u=kIR1g(k1取为4)相比较,结果如图3~12 所示 14*10 ×10 10 12 10 8 6 2 4 6 8×10 X/m 4 8×10 图4a=-7g时的拦截轨迹 X/m Fig.4 The pursuit trajectories when a=-7g 图3a=3g时的拦截轨迹 150r Fig.3 The pursuit trajectories when a=3g 100 由图3可知,ag=3g时采用PN制导律的拦截 时间为8.849s,脱靶量为0.61808m;采用SMG制导 50八 ARBFSM 律的拦截时间为8.685s,脱靶量为0.08123m;采用 0 ARBFSM制导律的拦截时间为8.675s,脱靶量为 -50 SMG 0.088585m.由图4可知,当aa=-7g时,采用PN -100 PN 脱靶量为69.8714m,已不满足拦截要求,而采用 -150 6 R SMG、ARBFSM的脱靶量分别为0.87478m、 t/s 0.3389m;拦截时间分别为10.884s、10.9298.SMG 图5a=3g时的导弹加速度变化曲线 与ARBFSM在对付大机动目标时,在脱靶量与拦截 Fig.5 The missile acceration commands when a=3g 时间上性能相当.由图5~6可知,ARBFSM制导律所