正在加载图片...
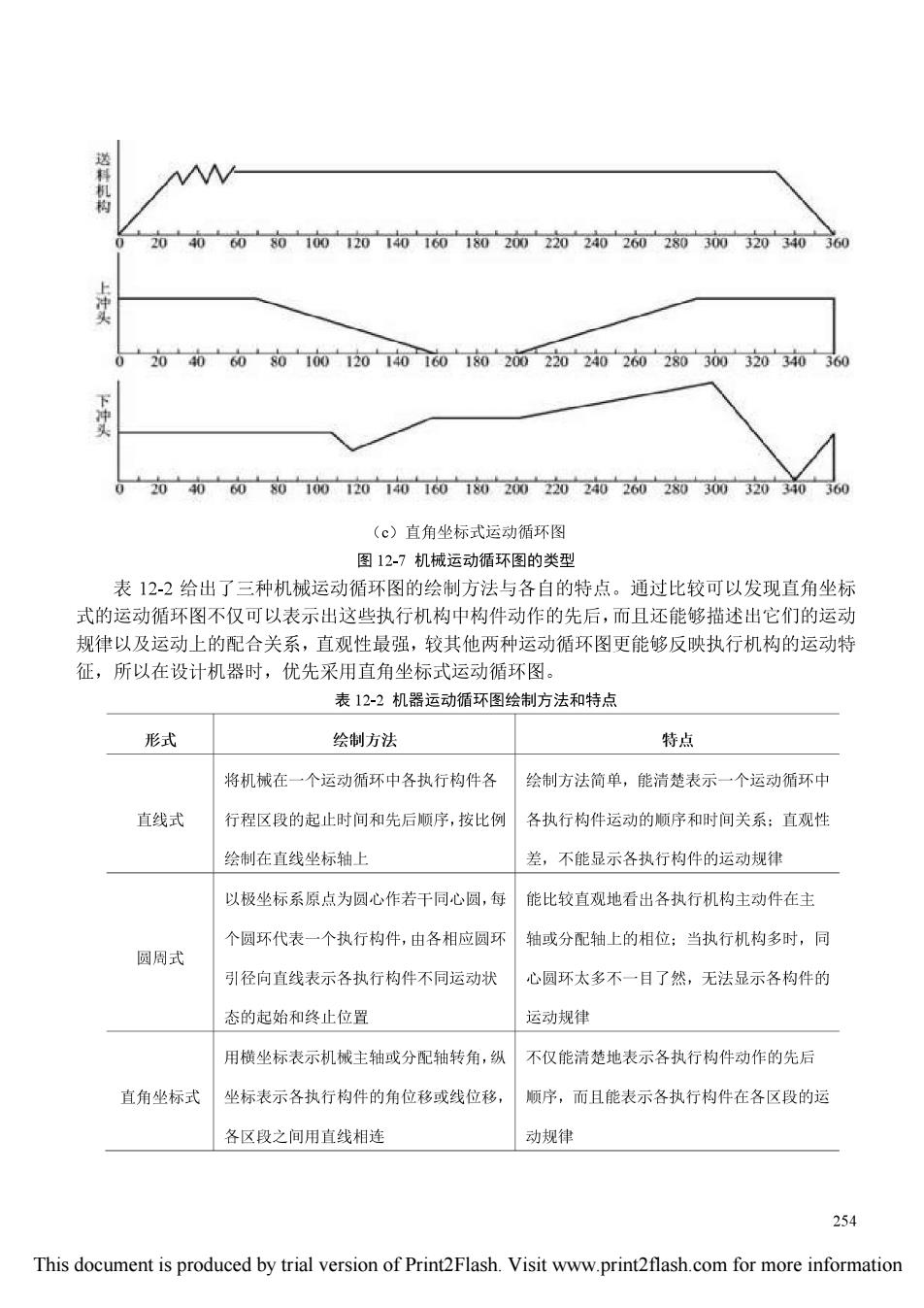
送料机构 204060801001201401601802002202026而280300320340360 冲头 20广4060010012014016018020022024026280300广320340广360 20406080100120140160广180200广220240260广280300320340广360 (c)直角坐标式运动循环图 图12-7机械运动循环图的类型 表12-2给出了三种机械运动循环图的绘制方法与各自的特点。通过比较可以发现直角坐标 式的运动循环图不仅可以表示出这些执行机构中构件动作的先后,而且还能够描述出它们的运动 规律以及运动上的配合关系,直观性最强,较其他两种运动循环图更能够反映执行机构的运动特 征,所以在设计机器时,优先采用直角坐标式运动循环图。 表12-2机器运动循环图绘制方法和特点 形式 绘制方法 特点 将机械在一个运动循环中各执行构件各 绘制方法简单,能清楚表示一个运动循环中 直线式 行程区段的起止时间和先后顺序,按比例 各执行构件运动的顺序和时间关系:直观性 绘制在直线坐标轴上 差,不能显示各执行构件的运动规律 以极坐标系原点为圆心作若干同心圆,每 能比较直观地看出各执行机构主动件在主 个圆环代表一个执行构件,由各相应圆环 轴或分配轴上的相位;当执行机构多时,同 圆周式 引径向直线表示各执行构件不同运动状 心圆环太多不一目了然,无法显示各构件的 态的起始和终止位置 运动规律 用横坐标表示机械主轴或分配轴转角,纵 不仅能清楚地表示各执行构件动作的先后 直角坐标式 坐标表示各执行构件的角位移或线位移, 顺序,而且能表示各执行构件在各区段的运 各区段之间用直线相连 动规律 254 This document is produced by trial version of Print2Flash.Visit www.print2flash.com for more informationThis document is produced by trial version of Print2Flash. Visit www.print2flash.com for more information