正在加载图片...
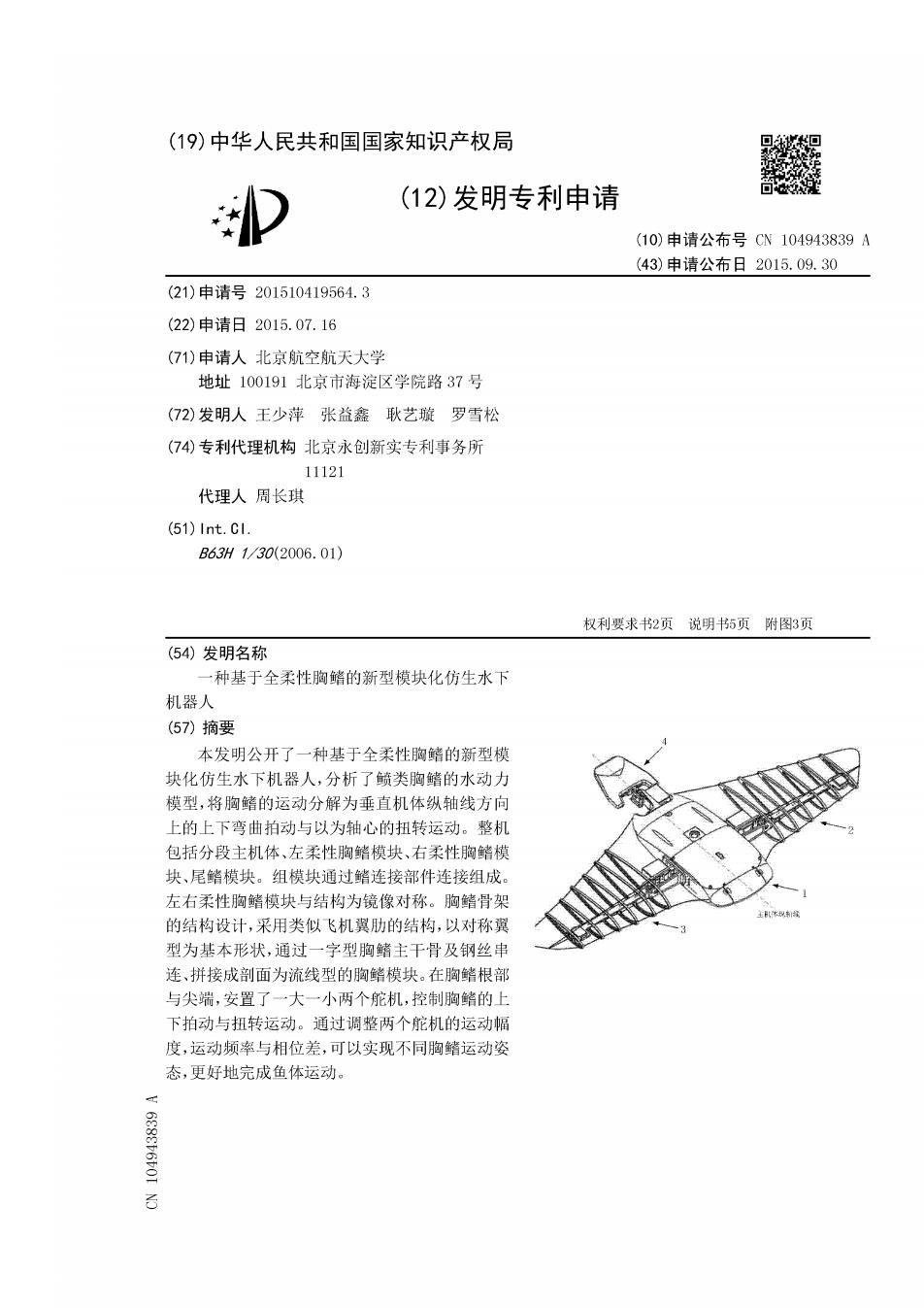
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN104943839A (43)申请公布日2015.09.30 (21)申请号201510419564.3 (22)申请日2015.07.16 (71)申请人北京航空航天大学 地址100191北京市海淀区学院路37号 (72)发明人王少萍张益鑫耿艺璇罗雪松 (74)专利代理机构北京永创新实专利事务所 11121 代理人周长琪 (51)1nt.Cl. B63H130(2006.01) 权利要求书2页说明书5页附图3页 (54)发明名称 一种基于全柔性胸鳍的新型模块化仿生水下 机器人 (57)摘要 本发明公开了一种基于全柔性胸鳍的新型模 块化仿生水下机器人,分析了鲼类胸鳍的水动力 模型,将胸鳍的运动分解为垂直机体纵轴线方向 上的上下弯曲拍动与以为轴心的扭转运动。整机 包括分段主机体、左柔性胸鳍模块、右柔性胸鳍模 块、尾鳍模块。组模块通过鳍连接部件连接组成。 左右柔性胸鳍模块与结构为镜像对称。胸鳍骨架 的结构设计,采用类似飞机翼肋的结构,以对称翼 型为基本形状,通过一字型胸鳍主干骨及钢丝串 连、拼接成剖面为流线型的胸鳍模块。在胸鳍根部 与尖端,安置了一大一小两个舵机,控制胸鳍的上 下拍动与扭转运动。通过调整两个舵机的运动幅 度,运动频率与相位差,可以实现不同胸鳍运动姿 态,更好地完成鱼体运动。 石