正在加载图片...
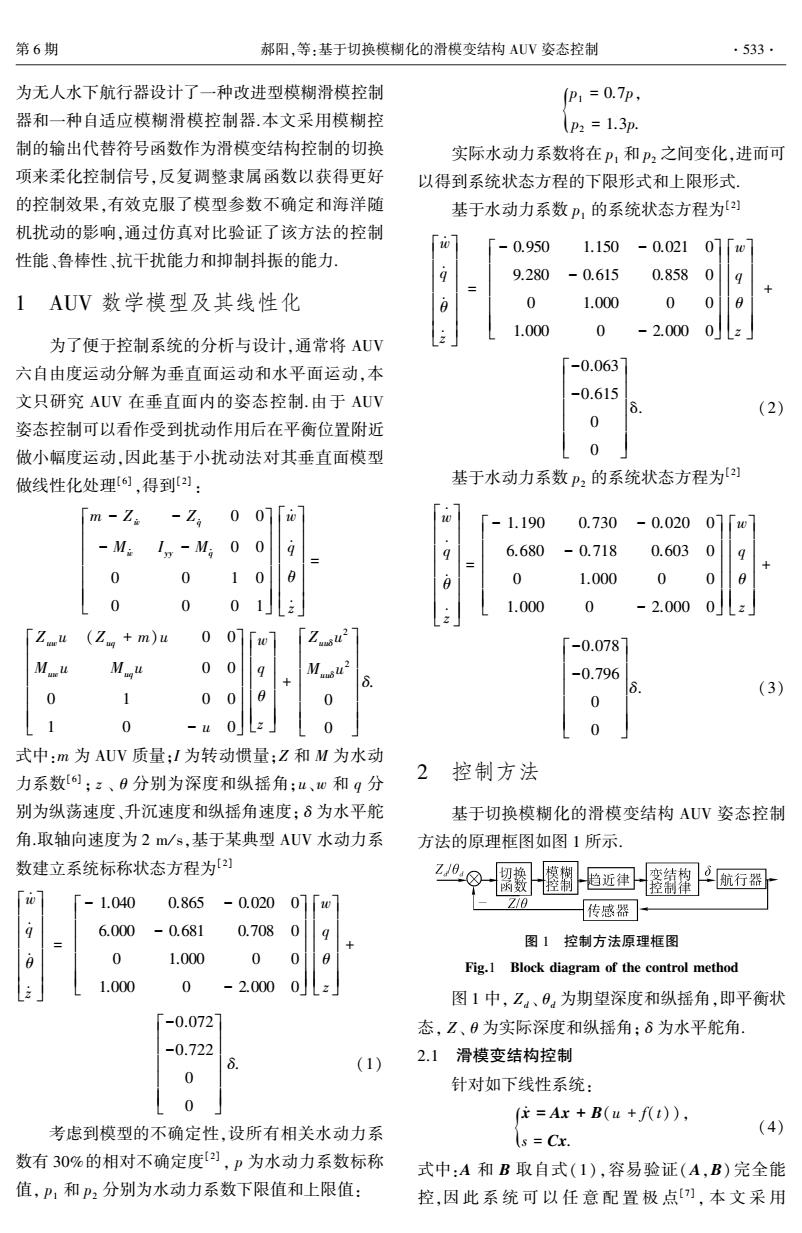
第6期 郝阳,等:基于切换模糊化的滑模变结构AUV姿态控制 ·533. 为无人水下航行器设计了一种改进型模糊滑模控制 P1=0.7p, 器和一种自适应模糊滑模控制器.本文采用模糊控 P2=1.3p. 制的输出代替符号函数作为滑模变结构控制的切换 实际水动力系数将在P1和P2之间变化,进而可 项来柔化控制信号,反复调整隶属函数以获得更好 以得到系统状态方程的下限形式和上限形式. 的控制效果,有效克服了模型参数不确定和海洋随 基于水动力系数P,的系统状态方程为[四 机扰动的影响,通过仿真对比验证了该方法的控制 「-0.950 1.150 -0.021 01 性能、鲁棒性、抗干扰能力和抑制抖振的能力」 9.280 -0.615 0.858 0 1AUV数学模型及其线性化 0 1.000 0 0 1.000 0 -2.000 0 为了便于控制系统的分析与设计,通常将AUV 六自由度运动分解为垂直面运动和水平面运动,本 -0.063 文只研究AUV在垂直面内的姿态控制.由于AUV -0.615 6 (2) 姿态控制可以看作受到扰动作用后在平衡位置附近 0 做小幅度运动,因此基于小扰动法对其垂直面模型 0 做线性化处理6,得到☒: 基于水动力系数P,的系统状态方程为 m -Z Za 001「w 「-1.190 0.730 -0.020 0 -M: 1n-M00 q 6.680-0.718 0.603 0 0 0 0 a 0 1.000 0 0 0 0 0 1.000 0 -2.0000」z」 Zu (Z+m)u 0 0 -0.078 Mu Mu 0 0 -0.796 0 0 (3) 0 1 0 u 0 0 0 式中:m为AUV质量;I为转动惯量;Z和M为水动 力系数[6;z、0分别为深度和纵摇角:u、0和g分 2控制方法 别为纵荡速度、升沉速度和纵摇角速度:8为水平舵 基于切换模糊化的滑模变结构AUV姿态控制 角.取轴向速度为2m/s,基于某典型AUV水动力系 方法的原理框图如图1所示. 数建立系统标称状态方程为 切换 模糊 趋近律 变结构 控制 控制 航行器 0 -1.040 0.865 -0.020 0][w Z/0 传感器 6.000 -0.681 0.708 0 9 + 图1控制方法原理框图 0 1.000 0 0 Fig.1 Block diagram of the control method 1.000 0 -2.000 oL=] 图1中,Z,、6。为期望深度和纵摇角,即平衡状 -0.072 态,Z、日为实际深度和纵摇角:δ为水平舵角, -0.722 (1) 2.1滑模变结构控制 0 针对如下线性系统: 0 (住=Ax+B(u+ft)), 考虑到模型的不确定性,设所有相关水动力系 (4) s =Cx. 数有30%的相对不确定度),P为水动力系数标称 式中:A和B取自式(1),容易验证(A,B)完全能 值,P1和P2分别为水动力系数下限值和上限值: 控,因此系统可以任意配置极点[),本文采用为无人水下航行器设计了一种改进型模糊滑模控制 器和一种自适应模糊滑模控制器.本文采用模糊控 制的输出代替符号函数作为滑模变结构控制的切换 项来柔化控制信号,反复调整隶属函数以获得更好 的控制效果,有效克服了模型参数不确定和海洋随 机扰动的影响,通过仿真对比验证了该方法的控制 性能、鲁棒性、抗干扰能力和抑制抖振的能力. 1 AUV 数学模型及其线性化 为了便于控制系统的分析与设计,通常将 AUV 六自由度运动分解为垂直面运动和水平面运动,本 文只研究 AUV 在垂直面内的姿态控制.由于 AUV 姿态控制可以看作受到扰动作用后在平衡位置附近 做小幅度运动,因此基于小扰动法对其垂直面模型 做线性化处理[6] ,得到[2] : m - Z·w - Z·q 0 0 - M·w Iyy - M·q 0 0 0 0 1 0 0 0 0 1 é ë ê ê ê ê ê ê ù û ú ú ú ú ú ú w · q · θ · z · é ë ê ê ê ê ê ê ù û ú ú ú ú ú ú = Zuw u (Zuq + m)u 0 0 Muw u Muqu 0 0 0 1 0 0 1 0 - u 0 é ë ê ê ê ê ê ê ù û ú ú ú ú ú ú w q θ z é ë ê ê ê ê ê ù û ú ú ú ú ú + Zuuδu 2 Muuδu 2 0 0 é ë ê ê ê ê ê ê ù û ú ú ú ú ú ú δ. 式中:m 为 AUV 质量;I 为转动惯量;Z 和 M 为水动 力系数[6] ; z 、 θ 分别为深度和纵摇角;u、w 和 q 分 别为纵荡速度、升沉速度和纵摇角速度; δ 为水平舵 角.取轴向速度为 2 m / s,基于某典型 AUV 水动力系 数建立系统标称状态方程为[2] w · q · θ · z · é ë ê ê ê ê ê ê ù û ú ú ú ú ú ú = - 1.040 0.865 - 0.020 0 6.000 - 0.681 0.708 0 0 1.000 0 0 1.000 0 - 2.000 0 é ë ê ê ê ê ê ù û ú ú ú ú ú w q θ z é ë ê ê ê ê ê ù û ú ú ú ú ú + -0.072 -0.722 0 0 é ë ê ê ê ê ê ù û ú ú ú ú ú δ. (1) 考虑到模型的不确定性,设所有相关水动力系 数有 30%的相对不确定度[2] , p 为水动力系数标称 值, p1 和 p2 分别为水动力系数下限值和上限值: p1 = 0.7p, p2 { = 1.3p. 实际水动力系数将在 p1 和 p2 之间变化,进而可 以得到系统状态方程的下限形式和上限形式. 基于水动力系数 p1 的系统状态方程为[2] w · q · θ · z · é ë ê ê ê ê ê ê ù û ú ú ú ú ú ú = - 0.950 1.150 - 0.021 0 9.280 - 0.615 0.858 0 0 1.000 0 0 1.000 0 - 2.000 0 é ë ê ê ê ê ê ù û ú ú ú ú ú w q θ z é ë ê ê ê ê ê ù û ú ú ú ú ú + -0.063 -0.615 0 0 é ë ê ê ê ê ê ù û ú ú ú ú ú δ. (2) 基于水动力系数 p2 的系统状态方程为[2] w · q · θ · z · é ë ê ê ê ê ê ê ê ù û ú ú ú ú ú ú ú = - 1.190 0.730 - 0.020 0 6.680 - 0.718 0.603 0 0 1.000 0 0 1.000 0 - 2.000 0 é ë ê ê ê ê ê ù û ú ú ú ú ú w q θ z é ë ê ê ê ê ê ù û ú ú ú ú ú + -0.078 -0.796 0 0 é ë ê ê ê ê ê ù û ú ú ú ú ú δ. (3) 2 控制方法 基于切换模糊化的滑模变结构 AUV 姿态控制 方法的原理框图如图 1 所示. 图 1 控制方法原理框图 Fig.1 Block diagram of the control method 图 1 中, Zd 、 θd 为期望深度和纵摇角,即平衡状 态, Z、 θ 为实际深度和纵摇角; δ 为水平舵角. 2.1 滑模变结构控制 针对如下线性系统: x · = Ax + B(u + f(t)), s = Cx. { (4) 式中:A 和 B 取自式(1),容易验证(A,B) 完全能 控,因 此 系 统 可 以 任 意 配 置 极 点[7] , 本 文 采 用 第 6 期 郝阳,等:基于切换模糊化的滑模变结构 AUV 姿态控制 ·533·