正在加载图片...
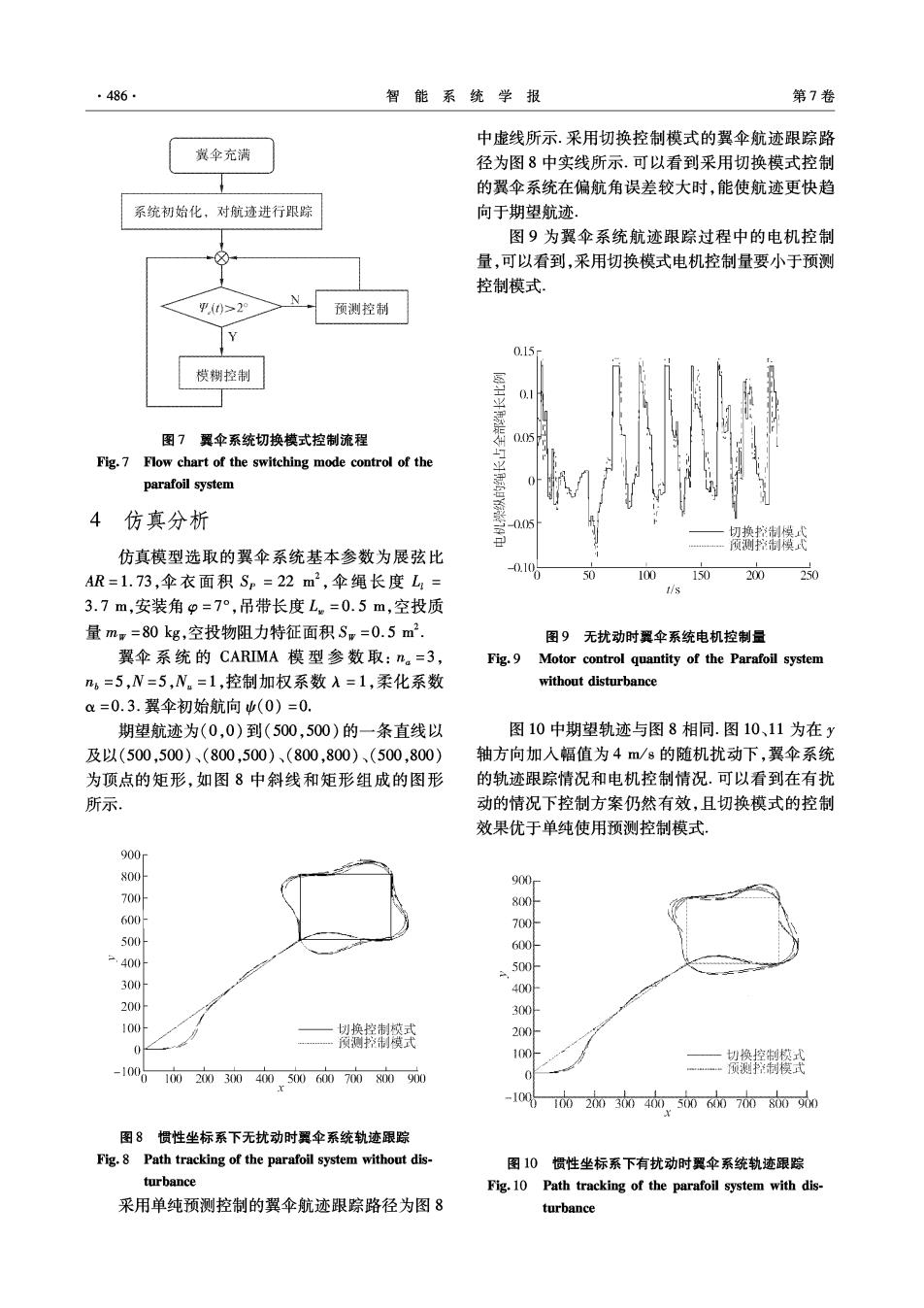
·486 智能系统学报 第7卷 中虚线所示.采用切换控制模式的翼伞航迹跟踪路 翼伞充满 径为图8中实线所示.可以看到采用切换模式控制 的翼伞系统在偏航角误差较大时,能使航迹更快趋 系统初始化,对航迹进行跟踪 向于期望航迹. 图9为翼伞系统航迹跟踪过程中的电机控制 量,可以看到,采用切换模式电机控制量要小于预测 控制模式 N 平(t0>2 预测控制 0.15 模糊控制 图7翼伞系统切换模式控制流程 0.05 Fig.7 Flow chart of the switching mode control of the parafoil system 4仿真分析 风热 仿真模型选取的翼伞系统基本参数为展弦比 -0.10 AR=1.73,伞衣面积Sp=22m2,伞绳长度L= 50 100 150 200 250 t/s 3.7m,安装角p=7°,吊带长度Lw=0.5m,空投质 量mm=80kg,空投物阻力特征面积Sm=0.5m2. 图9无扰动时翼伞系统电机控制量 翼伞系统的CARIMA模型参数取:na=3, Fig.9 Motor control quantity of the Parafoil system n=5,N=5,N.=1,控制加权系数A=1,柔化系数 without disturbance a=0.3.翼伞初始航向(0)=0. 期望航迹为(0,0)到(500,500)的一条直线以 图10中期望轨迹与图8相同.图10、11为在y 及以(500,500)、(800,500)、(800,800)、(500,800) 轴方向加入幅值为4m/s的随机扰动下,翼伞系统 为顶点的矩形,如图8中斜线和矩形组成的图形 的轨迹跟踪情况和电机控制情况.可以看到在有扰 所示。 动的情况下控制方案仍然有效,且切换模式的控制 效果优于单纯使用预测控制模式. 900r 800 900 700 80 600 700叶 500 600 2.400 300 400 200 300 100 投热接餐 200H 0 100 -1006 100200300400.500600700800900 -100 10020300400500600700800g00 图8惯性坐标系下无扰动时翼伞系统轨迹跟踪 Fig.8 Path tracking of the parafoil system without dis- 图10惯性坐标系下有扰动时翼伞系统轨迹跟踪 turbance Fig.10 Path tracking of the parafoil system with dis- 采用单纯预测控制的翼伞航迹跟踪路径为图8 turbance