正在加载图片...
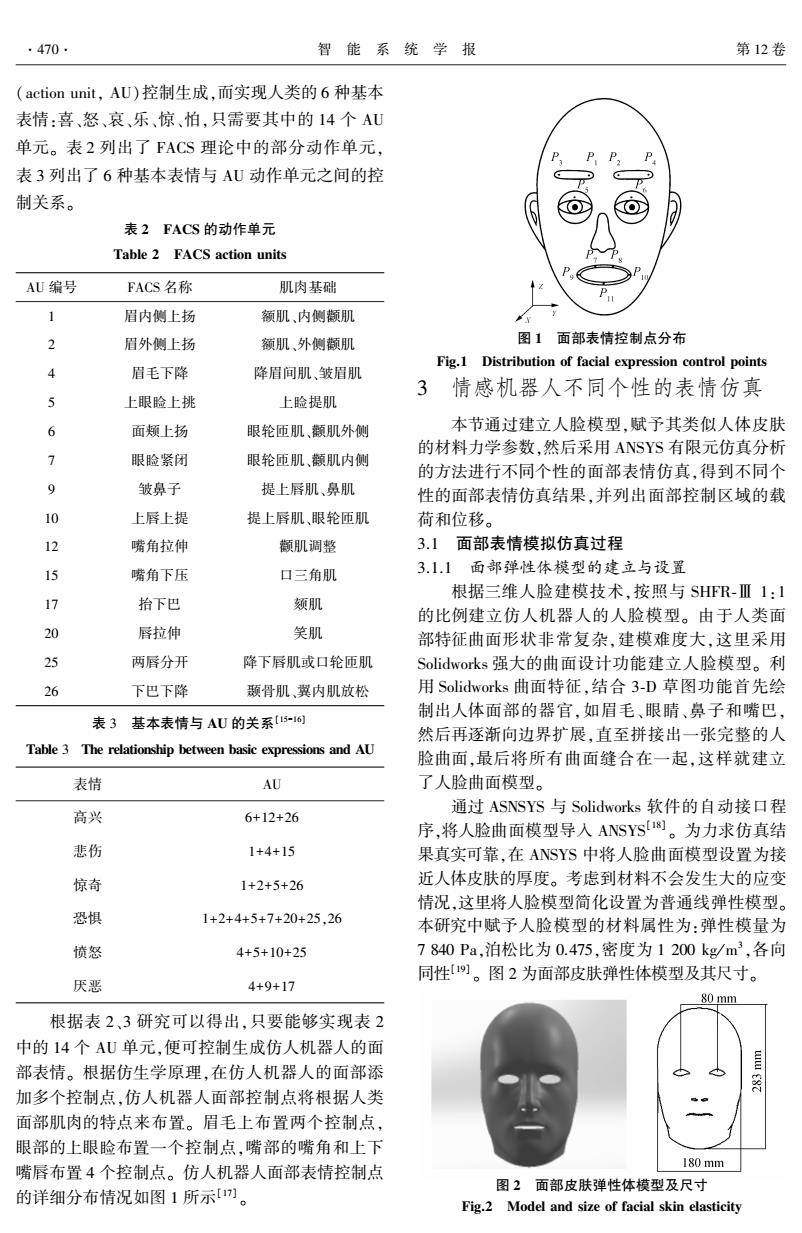
.470. 智能系统学报 第12卷 (action unit,AU)控制生成,而实现人类的6种基本 表情:喜、怒、哀、乐、惊、怕,只需要其中的14个AU 单元。表2列出了FACS理论中的部分动作单元, 表3列出了6种基本表情与AU动作单元之间的控 制关系。 表2FACS的动作单元 Table 2 FACS action units AU编号 FACS名称 肌肉基础 眉内侧上扬 额肌、内侧颧肌 眉外侧上扬 额肌、外侧颧肌 图1面部表情控制点分布 Fig.1 眉毛下降 降眉间肌、皱眉肌 Distribution of facial expression control points 4 3 情感机器人不同个性的表情仿真 上眼睑上挑 上脸提肌 6 面颊上扬 眼轮匝肌、颜肌外侧 本节通过建立人脸模型,赋予其类似人体皮肤 的材料力学参数,然后采用ANSYS有限元仿真分析 7 眼睑紧闭 眼轮匝肌、颜肌内侧 的方法进行不同个性的面部表情仿真,得到不同个 9 皱鼻子 提上唇肌、鼻肌 性的面部表情仿真结果,并列出面部控制区域的载 10 上唇上提 提上唇肌、眼轮匝肌 荷和位移。 12 嘴角拉伸 颧肌调整 3.1面部表情模拟仿真过程 15 嘴角下压 口三角肌 3.1.1面部弹性体模型的建立与设置 根据三维人脸建模技术,按照与SHFR-Ⅲ1:1 17 拾下巴 颏肌 的比例建立仿人机器人的人脸模型。由于人类面 20 唇拉伸 笑肌 部特征曲面形状非常复杂,建模难度大,这里采用 25 两唇分开 降下唇肌或口轮匝肌 Solidworks强大的曲面设计功能建立人脸模型。利 26 下巴下降 颞骨肌、翼内肌放松 用Solidworks曲面特征,结合3-D草图功能首先绘 制出人体面部的器官,如眉毛、眼睛、鼻子和嘴巴, 表3基本表情与AU的关系[5-16 然后再逐渐向边界扩展,直至拼接出一张完整的人 Table 3 The relationship between basic expressions and AU 脸曲面,最后将所有曲面缝合在一起,这样就建立 表情 AU 了人脸曲面模型。 高兴 通过ASNSYS与Solidworks软件的自动接口程 6+12+26 序,将人脸曲面模型导入ANSYS1)。为力求仿真结 悲伤 1+4+15 果真实可靠,在ANSYS中将人脸曲面模型设置为接 惊奇 1+2+5+26 近人体皮肤的厚度。考虑到材料不会发生大的应变 情况,这里将人脸模型简化设置为普通线弹性模型。 恐惧 1+2+4+5+7+20+25.26 本研究中赋予人脸模型的材料属性为:弹性模量为 愤怒 4+5+10+25 7840Pa,泊松比为0.475,密度为1200kg/m3,各向 同性。图2为面部皮肤弹性体模型及其尺寸。 厌恶 4+9+17 80 mm 根据表2、3研究可以得出,只要能够实现表2 中的14个AU单元,便可控制生成仿人机器人的面 部表情。根据仿生学原理,在仿人机器人的面部添 加多个控制点,仿人机器人面部控制点将根据人类 面部肌肉的特点来布置。眉毛上布置两个控制点, 眼部的上眼脸布置一个控制点,嘴部的嘴角和上下 嘴唇布置4个控制点。仿人机器人面部表情控制点 180mm 图2面部皮肤弹性体模型及尺寸 的详细分布情况如图1所示[7]。 Fig.2 Model and size of facial skin elasticity(action unit, AU)控制生成,而实现人类的 6 种基本 表情:喜、怒、哀、乐、惊、怕,只需要其中的 14 个 AU 单元。 表 2 列出了 FACS 理论中的部分动作单元, 表 3 列出了 6 种基本表情与 AU 动作单元之间的控 制关系。 表 2 FACS 的动作单元 Table 2 FACS action units AU 编号 FACS 名称 肌肉基础 1 眉内侧上扬 额肌、内侧颧肌 2 眉外侧上扬 额肌、外侧颧肌 4 眉毛下降 降眉间肌、皱眉肌 5 上眼睑上挑 上睑提肌 6 面颊上扬 眼轮匝肌、颧肌外侧 7 眼睑紧闭 眼轮匝肌、颧肌内侧 9 皱鼻子 提上唇肌、鼻肌 10 上唇上提 提上唇肌、眼轮匝肌 12 嘴角拉伸 颧肌调整 15 嘴角下压 口三角肌 17 抬下巴 颏肌 20 唇拉伸 笑肌 25 两唇分开 降下唇肌或口轮匝肌 26 下巴下降 颞骨肌、翼内肌放松 表 3 基本表情与 AU 的关系[15-16] Table 3 The relationship between basic expressions and AU 表情 AU 高兴 6+12+26 悲伤 1+4+15 惊奇 1+2+5+26 恐惧 1+2+4+5+7+20+25,26 愤怒 4+5+10+25 厌恶 4+9+17 根据表 2、3 研究可以得出,只要能够实现表 2 中的 14 个 AU 单元,便可控制生成仿人机器人的面 部表情。 根据仿生学原理,在仿人机器人的面部添 加多个控制点,仿人机器人面部控制点将根据人类 面部肌肉的特点来布置。 眉毛上布置两个控制点, 眼部的上眼睑布置一个控制点,嘴部的嘴角和上下 嘴唇布置 4 个控制点。 仿人机器人面部表情控制点 的详细分布情况如图 1 所示[17] 。 图 1 面部表情控制点分布 Fig.1 Distribution of facial expression control points 3 情感机器人不同个性的表情仿真 本节通过建立人脸模型,赋予其类似人体皮肤 的材料力学参数,然后采用 ANSYS 有限元仿真分析 的方法进行不同个性的面部表情仿真,得到不同个 性的面部表情仿真结果,并列出面部控制区域的载 荷和位移。 3.1 面部表情模拟仿真过程 3.1.1 面部弹性体模型的建立与设置 根据三维人脸建模技术,按照与 SHFR⁃Ⅲ 1:1 的比例建立仿人机器人的人脸模型。 由于人类面 部特征曲面形状非常复杂,建模难度大,这里采用 Solidworks 强大的曲面设计功能建立人脸模型。 利 用 Solidworks 曲面特征,结合 3⁃D 草图功能首先绘 制出人体面部的器官,如眉毛、眼睛、鼻子和嘴巴, 然后再逐渐向边界扩展,直至拼接出一张完整的人 脸曲面,最后将所有曲面缝合在一起,这样就建立 了人脸曲面模型。 通过 ASNSYS 与 Solidworks 软件的自动接口程 序,将人脸曲面模型导入 ANSYS [18] 。 为力求仿真结 果真实可靠,在 ANSYS 中将人脸曲面模型设置为接 近人体皮肤的厚度。 考虑到材料不会发生大的应变 情况,这里将人脸模型简化设置为普通线弹性模型。 本研究中赋予人脸模型的材料属性为:弹性模量为 7 840 Pa,泊松比为 0.475,密度为 1 200 kg / m 3 ,各向 同性[19] 。 图 2 为面部皮肤弹性体模型及其尺寸。 图 2 面部皮肤弹性体模型及尺寸 Fig.2 Model and size of facial skin elasticity ·470· 智 能 系 统 学 报 第 12 卷