正在加载图片...
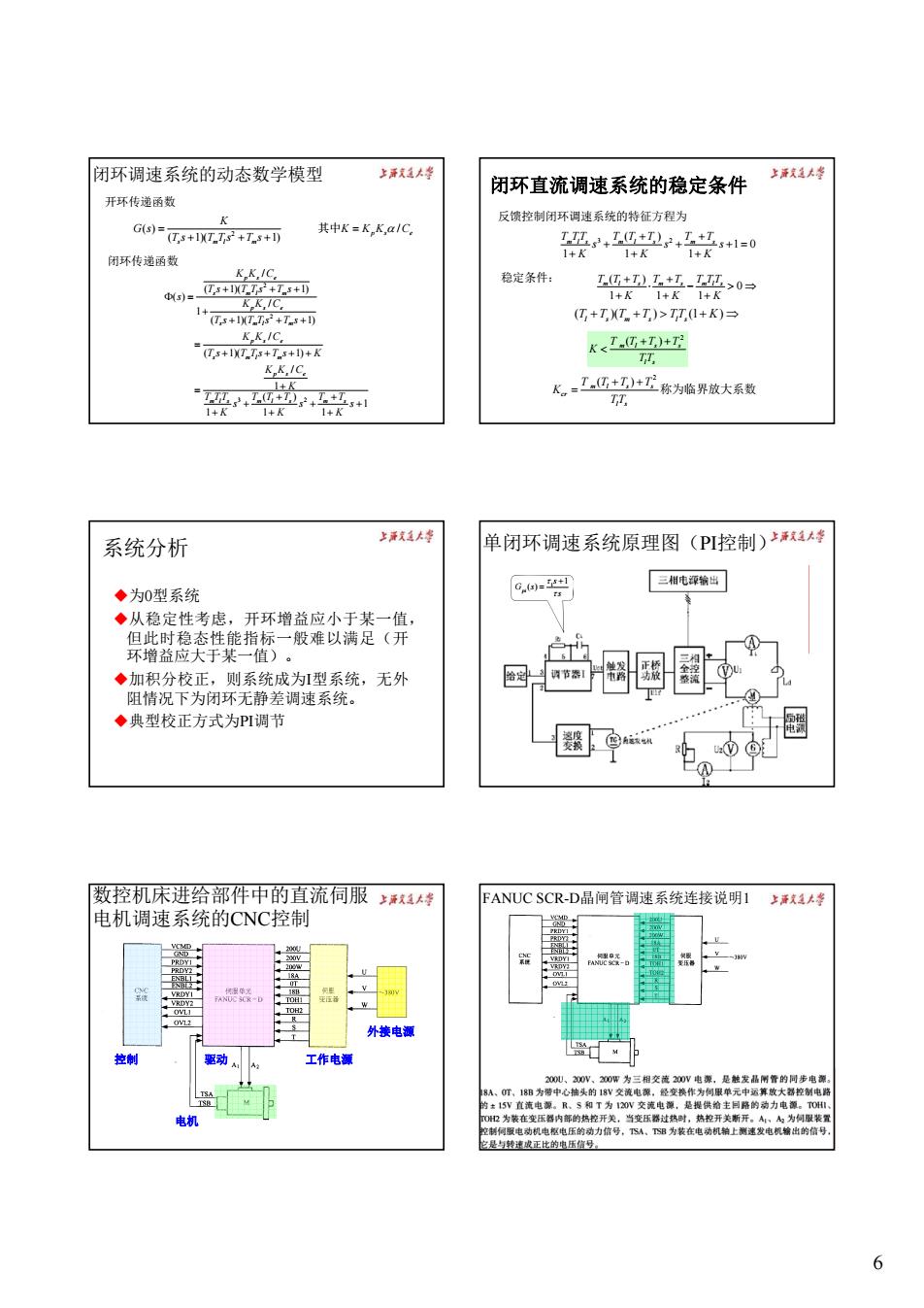
闭环调速系统的动态数学模型 上爵成道人华 上评良总大当 闭环直流调速系统的稳定条件 开环传递函数 K 反馈控制闭环调速系统的特征方程为 G(s)= 其中K=KK,a/C (T,s+1TT2+Ts+1) T玛g+T+2+,+ 3+1=0 1+K 1+K 1+K 闭环传递函数 K.K./C. 稳定条件: T+.工+工-T巫>0→ s)= (T3+1(TT示2+T.s+1万 1+K1+K1+K K KIC 1+ (Ts+I)(T.Ts+Ts+1) (T+TXT+T)>TT(1+K) KK,/C. (Ts+1XT Ts+Ts+1)+K k<T亿+Z+r TT, KK,IC “+D+++1 K。-T亿+I+☑称为临界放大系数 TT 1+R 1+K 1+K 系统分析 上承道大修 单闭环调速系统原理图(PI控制)峰 ◆为0型系统 C.=5中 三相吨源输出 ◆从稳定性考虑,开环增益应小于某一值, 但此时稳态性能指标一般难以满足(开 环增益应大于某一值)。 ◆加积分校正,则系统成为型系统,无外 节器月 阻情况下为闭环无静差调速系统。 ◆典型校正方式为PI调节 数控机床进给部件中的直流伺服丝烤 FANUC SCR-D晶闸管调速系统连接说明1 上海文总人孝 电机调速系统的CNC控制 是-D TOH2 外接电源 控制 驱动 工作电源 200U、200V、200W为三相交藏200V电源,是触发晶附管的同步电源 8A、0们,18B为带中心抽头的18V交流电源.经变换作为何服单元中运算放大器控制电路 的±15V直流电源。R、S和T为120V交流电源,是提供给主同路的动力电源。TO州 电机 O卫为装在变压器内部的热控开美,当变压器过热时,热控开关新开。A,A为何服装置 控制服电动机电枢电压的动力信号,S、TSB为装在电动机轴上测速发电机输出的信号 它是与转速成正比的电压信号。 66 闭环调速系统的动态数学模型 2 ( ) / ( 1)( 1) ps e s ml m K Gs K KK C Ts T Ts T s = = α + ++ 其中 开环传递函数 闭环传递函数 2 / ( 1)( 1) KK C ps e Ts T Ts T s + ++ 2 3 2 ( 1)( 1) () / 1 ( 1)( 1) / ( 1)( 1) / 1 ( ) 1 11 1 s ml m ps e s ml m ps e s ml m ps e mls m l s m s Ts T Ts T s s KK C Ts T Ts T s KK C Ts T Ts T s K KK C K T TT T T T T T s ss K K K + ++ Φ = + + ++ = + + ++ + = + + + ++ ++ + 闭环直流调速系统的稳定条件 3 2 ( ) 1 0 11 1 T TT T T T T T mls m l s m s s ss KK K + + + + += ++ + 反馈控制闭环调速系统的特征方程为 稳定条件: ( ) 0 T T T T T T TT m l s m s mls + + ⋅ − >⇒ 1 11 + K KK + + ( )( ) (1 ) T T T T TT K l s m s ls + +> +⇒ 2 ( ) ml s s l s TTT T K TT + + < 2 ( ) ml s s cr l s TTT T K TT + + = 称为临界放大系数 系统分析 为0型系统 从稳定性考虑,开环增益应小于某一值, 但此时稳态性能指标一般难以满足(开 环增益应大于某 值 环增益应大于某一值)。 加积分校正,则系统成为I型系统,无外 阻情况下为闭环无静差调速系统。 典型校正方式为PI调节 单闭环调速系统原理图(PI控制) 1 1 ( ) pi s G s s τ τ + = s s K s s W s pi pi 1 1 1 1 1 ( ) τ τ τ τ + = + = 数控机床进给部件中的直流伺服 电机调速系统的CNC控制 控制 驱动 工作电源 外接电源 电机 FANUC SCR-D晶闸管调速系统连接说明1