正在加载图片...
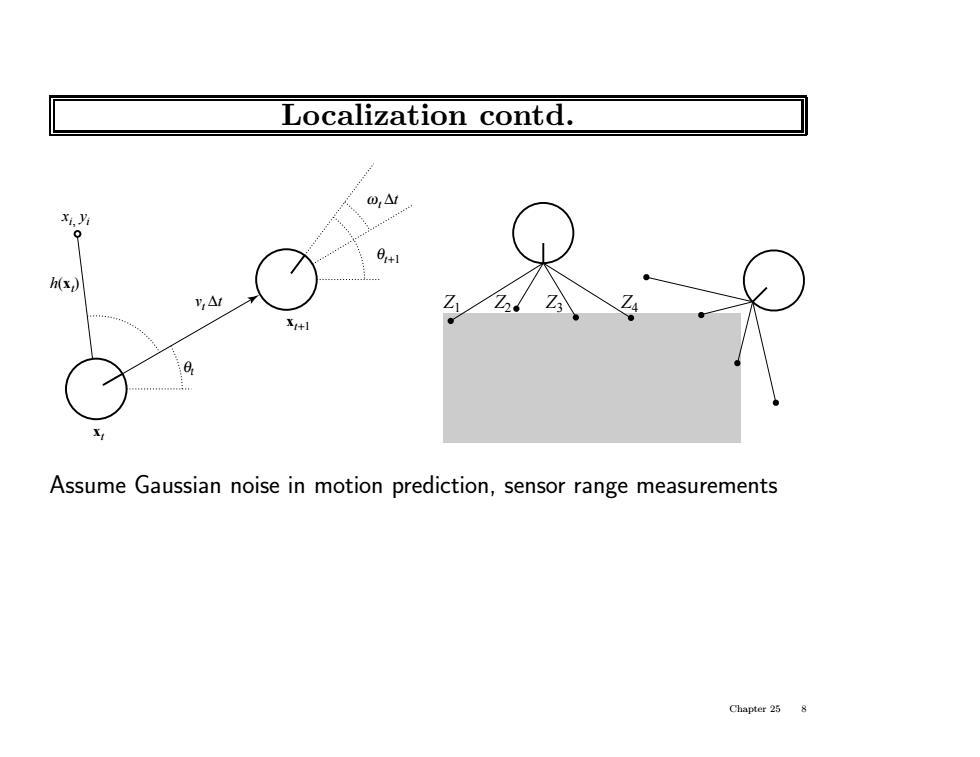
Localization contd. 0,△ 61+1 h(x) Al +1 Assume Gaussian noise in motion prediction,sensor range measurements Chapter 25 8 Localization contd. xi, yi vt ∆t t ∆t t+1 xt+1 h(xt) xt θt θ ω Z1 Z2 Z3 Z4 Assume Gaussian noise in motion prediction, sensor range measurements Chapter 25 8