正在加载图片...
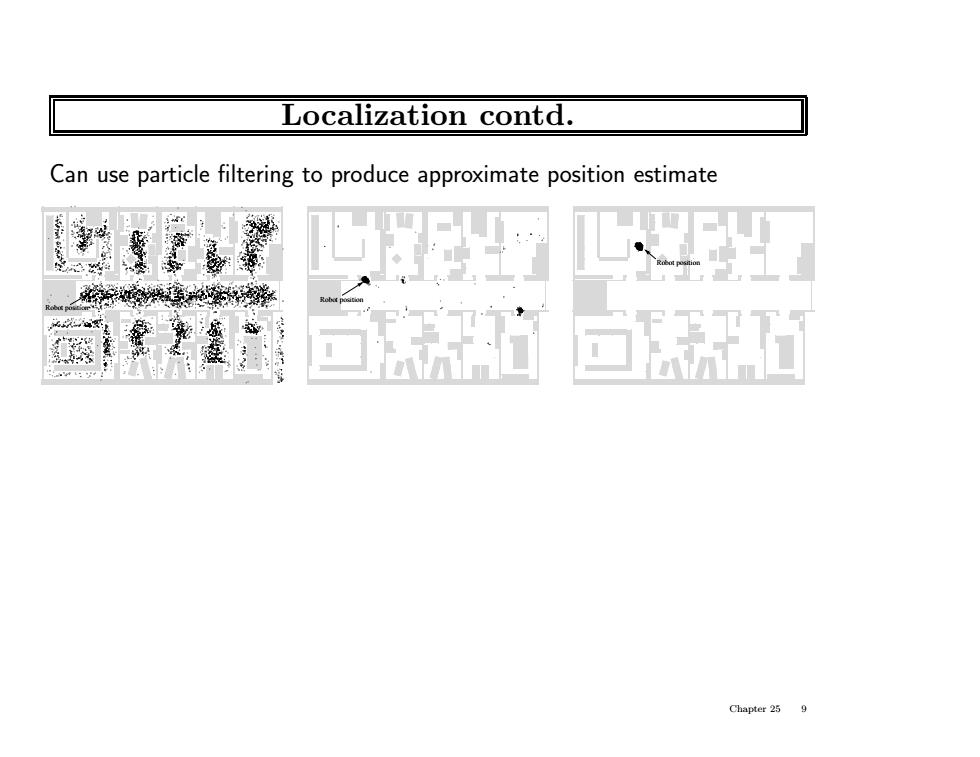
Localization contd. Can use particle filtering to produce approximate position estimate Chapter 25 9Localization contd. Can use particle filtering to produce approximate position estimate Robot position Robot position Robot position Chapter 25 9