正在加载图片...
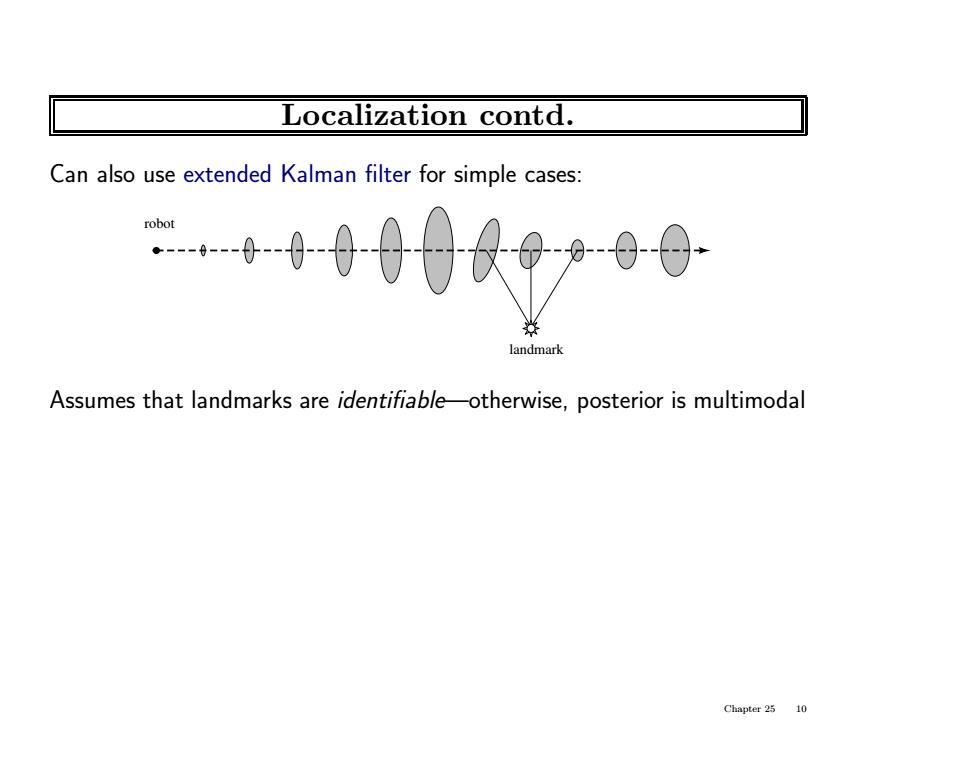
Localization contd. Can also use extended Kalman filter for simple cases: :+40民合0 landmark Assumes that landmarks are identifiable-otherwise,posterior is multimodal Chapter 25 10 Localization contd. Can also use extended Kalman filter for simple cases: robot landmark Assumes that landmarks are identifiable—otherwise, posterior is multimodal Chapter 25 10