正在加载图片...
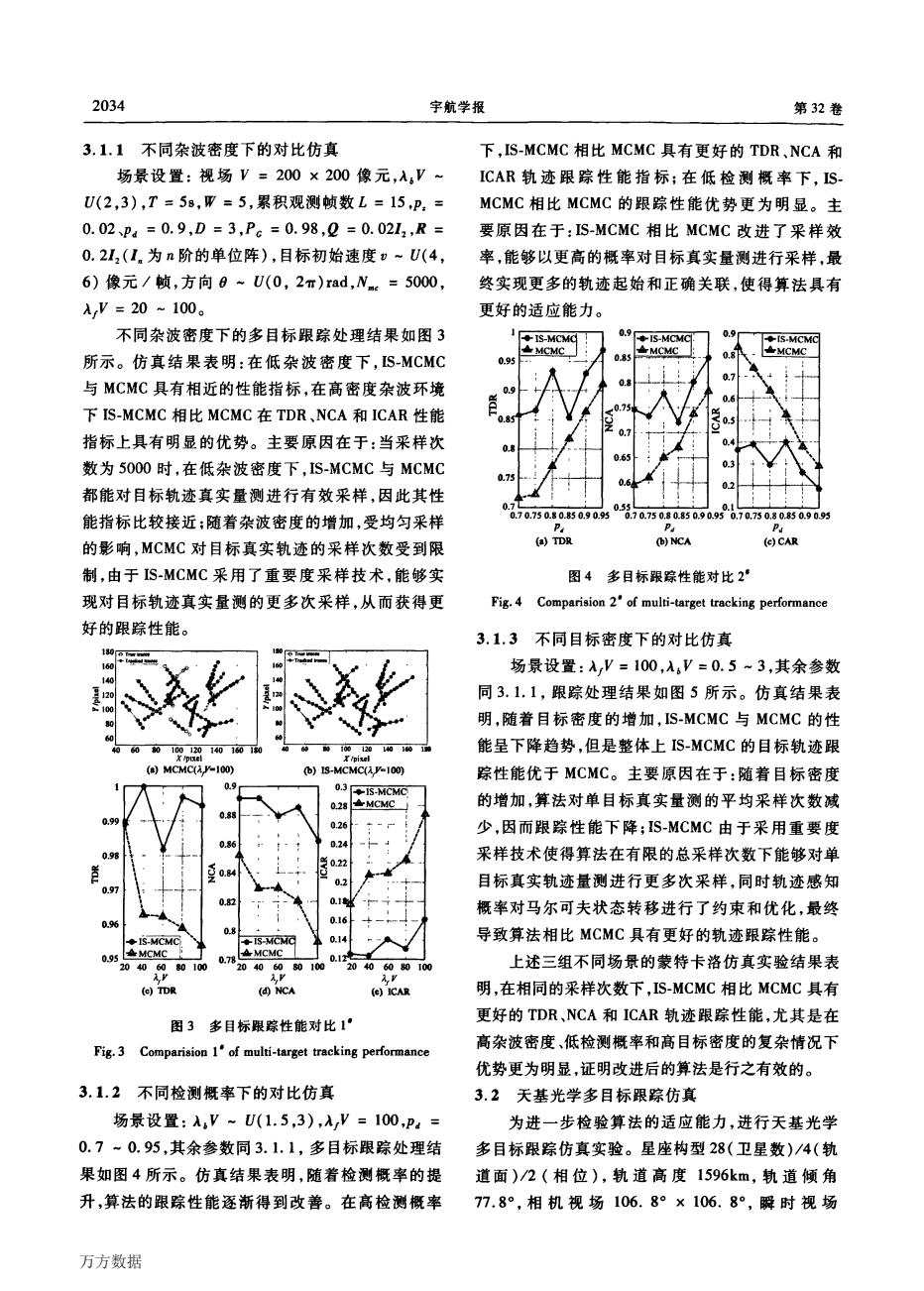
2034 宇航学报 第32卷 3.1.1不同杂波密度下的对比仿真 下,IS-MCMC相比MCMC具有更好的TDR、NCA和 场景设置:视场V=200×200像元,入,V~ ICAR轨迹跟踪性能指标;在低检测概率下,IS- U(2,3),T=58,W=5,累积观测帧数L=15,P= MCMC相比MCMC的跟踪性能优势更为明显。主 0.02pa=0.9,D=3,Pc=0.98,2=0.0212,R= 要原因在于:IS-MCMC相比MCMC改进了采样效 0.212(I.为n阶的单位阵),目标初始速度v~U(4, 率,能够以更高的概率对目标真实量测进行采样,最 6)像元/帧,方向0~U(0,2m)rad,N=5000, 终实现更多的轨迹起始和正确关联,使得算法具有 入V=20~100。 更好的适应能力。 不同杂波密度下的多目标跟踪处理结果如图3 IS-MCMO 0.9 ◆IS-MCMC 0.9 ◆Is.MCMC MCMC MCMC MCMC 所示。仿真结果表明:在低杂波密度下,IS-MCMC 0.95 0R5 0.7 与MCMC具有相近的性能指标,在高密度杂波环境 下IS-MCMC相比MCMC在TDR、NCA和ICAR性能 指标上具有明显的优势。主要原因在于:当采样次 04 0.65 数为5000时,在低杂波密度下,IS-MCMC与MCMC 0 7 02 都能对目标轨迹真实量测进行有效采样,因此其性 0 能指标比较接近;随着杂波密度的增加,受均匀采样 0.70.750.80.850.90.95 5g70750085090970750050909 0. P P P 的影响,MCMC对目标真实轨迹的采样次数受到限 (a)TDR (b)NCA (e)CAR 制,由于IS-MCMC采用了重要度采样技术,能够实 图4多目标跟踪性能对比2 现对目标轨迹真实量测的更多次采样,从而获得更 Fig.4 Comparision 2'of multi-target tracking performance 好的跟踪性能。 3.1.3不同目标密度下的对比仿真 180a 160 场景设置:入V=100,.V=0.5~3,其余参数 2 同3.1,1,跟踪处理结果如图5所示。仿真结果表 明,随着目标密度的增加,IS-MCMC与MCMC的性 14016010 60100120 能呈下降趋势,但是整体上IS-MCMC的目标轨迹跟 X/pisel (a)MCMC(A-100) (b)IS-MCMC(V-100) 踪性能优于MCMC。主要原因在于:随着目标密度 0.9 03 ◆IS-MCMC 12 MCMC 的增加,算法对单目标真实量测的平均采样次数减 少,因而跟踪性能下降;IS-MCMC由于采用重要度 .24 .9 0.22 采样技术使得算法在有限的总采样次数下能够对单 02 目标真实轨迹量测进行更多次采样,同时轨迹感知 0.14 概率对马尔可夫状态转移进行了约束和优化,最终 0.16 0.8 ◆IS-MCMC ◆Is-MCM间 0.14 导致算法相比MCMC具有更好的轨迹跟踪性能。 0.9 AMCMC AMCMC 0.7 8204060 0.1 2040,600100 80100 20406080100 上述三组不同场景的蒙特卡洛仿真实验结果表 AV (e)TDR (④NCA (e)ICAR 明,在相同的采样次数下,IS-MCMC相比MCMC具有 图3多目标跟踪性能对比1· 更好的TDR、NCA和ICAR轨迹跟踪性能,尤其是在 Fig.3 Comparision 1'of multi-target tracking performance 高杂波密度,低检测概率和高目标密度的复杂情况下 优势更为明显,证明改进后的算法是行之有效的。 3.1.2不同检测概率下的对比仿真 3.2天基光学多目标跟踪仿真 场景设置:A~U(1.5,3),入V=100,P4= 为进一步检验算法的适应能力,进行天基光学 0.7~0.95,其余参数同3.1.1,多目标跟踪处理结 多目标跟踪仿真实验。星座构型28(卫星数)/4(轨 果如图4所示。仿真结果表明,随着检测概率的提 道面)/2(相位),轨道高度1596km,轨道倾角 升,算法的跟踪性能逐渐得到改善。在高检测概率 77.8°,相机视场106.8°×106.8°,瞬时视场 万方数据2034 万方数据