正在加载图片...
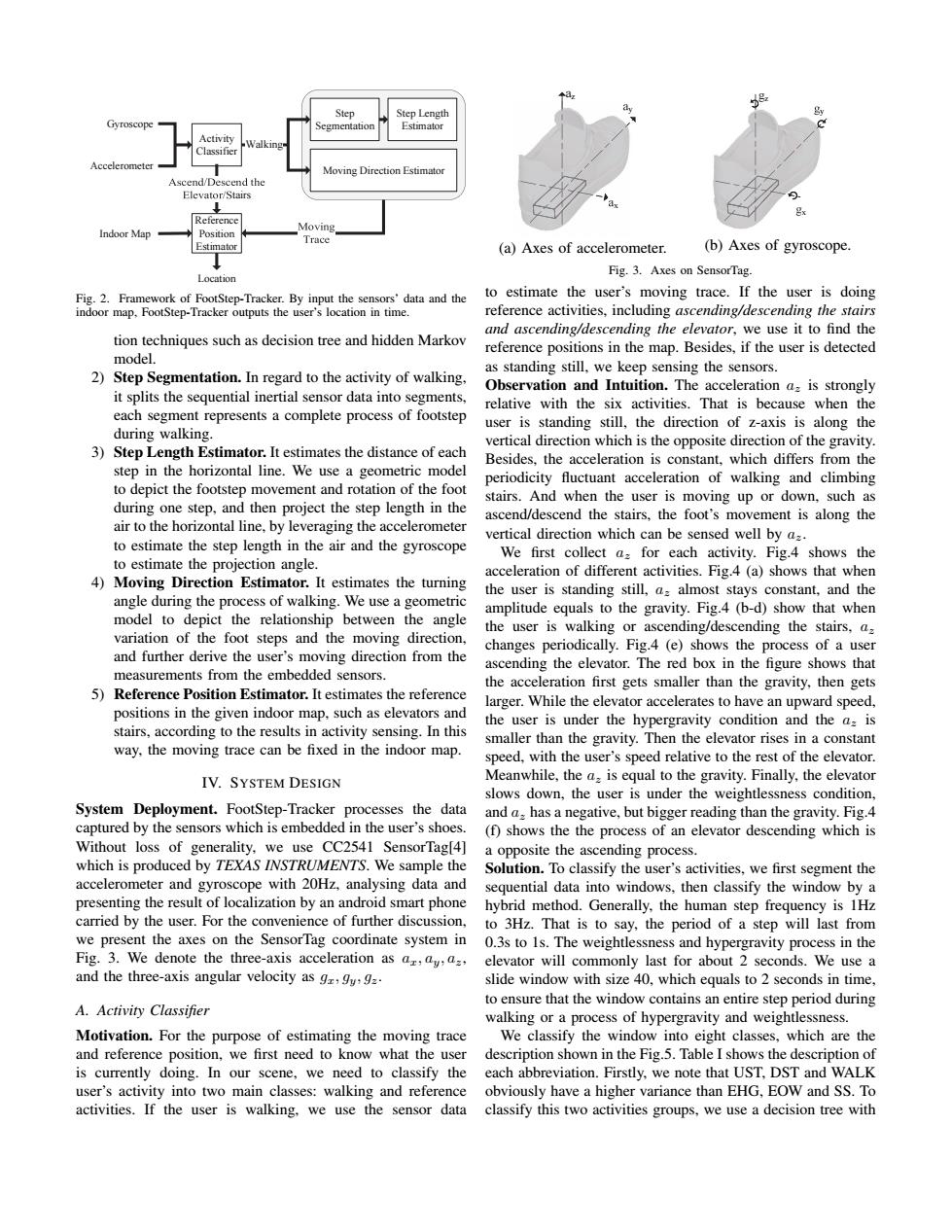
Step Step Length Gyroscope Estimator Activity .Walkin Moving Direction Estimator Ascend/Descend the Elevator/Stairs Reference Moving Indoor Map Position Trace 5tat (a)Axes of accelerometer. (b)Axes of gyroscope. Location Fig.3.Axes on SensorTag. Fig.2.Framework of FootStep-Tracker.By input the sensors'data and the to estimate the user's moving trace.If the user is doing indoor map,FootStep-Tracker outputs the user's location in time. reference activities,including ascending/descending the stairs and ascending/descending the elevator,we use it to find the tion techniques such as decision tree and hidden Markov reference positions in the map.Besides,if the user is detected model. as standing still,we keep sensing the sensors. 2)Step Segmentation.In regard to the activity of walking, Observation and Intuition.The acceleration a:is strongly it splits the sequential inertial sensor data into segments, relative with the six activities.That is because when the each segment represents a complete process of footstep user is standing still,the direction of z-axis is along the during walking. vertical direction which is the opposite direction of the gravity. 3)Step Length Estimator.It estimates the distance of each Besides,the acceleration is constant,which differs from the step in the horizontal line.We use a geometric model periodicity fluctuant acceleration of walking and climbing to depict the footstep movement and rotation of the foot stairs.And when the user is moving up or down,such as during one step,and then project the step length in the ascend/descend the stairs,the foot's movement is along the air to the horizontal line,by leveraging the accelerometer to estimate the step length in the air and the gyroscope vertical direction which can be sensed well by a=. We first collect a:for each activity.Fig.4 shows the to estimate the projection angle. acceleration of different activities.Fig.4(a)shows that when 4)Moving Direction Estimator.It estimates the turning the user is standing still,a almost stays constant,and the angle during the process of walking.We use a geometric amplitude equals to the gravity.Fig.4 (b-d)show that when model to depict the relationship between the angle the user is walking or ascending/descending the stairs,a. variation of the foot steps and the moving direction, changes periodically.Fig.4 (e)shows the process of a user and further derive the user's moving direction from the ascending the elevator.The red box in the figure shows that measurements from the embedded sensors. the acceleration first gets smaller than the gravity,then gets 5)Reference Position Estimator.It estimates the reference larger.While the elevator accelerates to have an upward speed, positions in the given indoor map,such as elevators and the user is under the hypergravity condition and the a is stairs,according to the results in activity sensing.In this smaller than the gravity.Then the elevator rises in a constant way,the moving trace can be fixed in the indoor map. speed,with the user's speed relative to the rest of the elevator IV.SYSTEM DESIGN Meanwhile,the a.is equal to the gravity.Finally,the elevator slows down,the user is under the weightlessness condition, System Deployment.FootStep-Tracker processes the data and a:has a negative,but bigger reading than the gravity.Fig.4 captured by the sensors which is embedded in the user's shoes. (f)shows the the process of an elevator descending which is Without loss of generality,we use CC2541 SensorTag[4] a opposite the ascending process. which is produced by TEXAS INSTRUMENTS.We sample the Solution.To classify the user's activities.we first segment the accelerometer and gyroscope with 20Hz,analysing data and sequential data into windows,then classify the window by a presenting the result of localization by an android smart phone hybrid method.Generally,the human step frequency is 1Hz carried by the user.For the convenience of further discussion,to 3Hz.That is to say,the period of a step will last from we present the axes on the SensorTag coordinate system in 0.3s to Is.The weightlessness and hypergravity process in the Fig.3.We denote the three-axis acceleration as a,ay a elevator will commonly last for about 2 seconds.We use a and the three-axis angular velocity as g,gyg slide window with size 40,which equals to 2 seconds in time, to ensure that the window contains an entire step period during A.Activity Classifier walking or a process of hypergravity and weightlessness. Motivation.For the purpose of estimating the moving trace We classify the window into eight classes,which are the and reference position,we first need to know what the user description shown in the Fig.5.Table I shows the description of is currently doing.In our scene,we need to classify the each abbreviation.Firstly,we note that UST,DST and WALK user's activity into two main classes:walking and reference obviously have a higher variance than EHG,EOW and SS.To activities.If the user is walking.we use the sensor data classify this two activities groups,we use a decision tree withGyroscope Accelerometer Activity Classifier Step Segmentation Moving Direction Estimator Step Length Estimator Reference Position Estimator Walking tairs Indoor Map Location Fig. 2. Framework of FootStep-Tracker. By input the sensors’ data and the indoor map, FootStep-Tracker outputs the user’s location in time. tion techniques such as decision tree and hidden Markov model. 2) Step Segmentation. In regard to the activity of walking, it splits the sequential inertial sensor data into segments, each segment represents a complete process of footstep during walking. 3) Step Length Estimator. It estimates the distance of each step in the horizontal line. We use a geometric model to depict the footstep movement and rotation of the foot during one step, and then project the step length in the air to the horizontal line, by leveraging the accelerometer to estimate the step length in the air and the gyroscope to estimate the projection angle. 4) Moving Direction Estimator. It estimates the turning angle during the process of walking. We use a geometric model to depict the relationship between the angle variation of the foot steps and the moving direction, and further derive the user’s moving direction from the measurements from the embedded sensors. 5) Reference Position Estimator. It estimates the reference positions in the given indoor map, such as elevators and stairs, according to the results in activity sensing. In this way, the moving trace can be fixed in the indoor map. IV. SYSTEM DESIGN System Deployment. FootStep-Tracker processes the data captured by the sensors which is embedded in the user’s shoes. Without loss of generality, we use CC2541 SensorTag[4] which is produced by TEXAS INSTRUMENTS. We sample the accelerometer and gyroscope with 20Hz, analysing data and presenting the result of localization by an android smart phone carried by the user. For the convenience of further discussion, we present the axes on the SensorTag coordinate system in Fig. 3. We denote the three-axis acceleration as ax, ay, az, and the three-axis angular velocity as gx, gy, gz. A. Activity Classifier Motivation. For the purpose of estimating the moving trace and reference position, we first need to know what the user is currently doing. In our scene, we need to classify the user’s activity into two main classes: walking and reference activities. If the user is walking, we use the sensor data ay az ax (a) Axes of accelerometer. gy gz gx (b) Axes of gyroscope. Fig. 3. Axes on SensorTag. to estimate the user’s moving trace. If the user is doing reference activities, including ascending/descending the stairs and ascending/descending the elevator, we use it to find the reference positions in the map. Besides, if the user is detected as standing still, we keep sensing the sensors. Observation and Intuition. The acceleration az is strongly relative with the six activities. That is because when the user is standing still, the direction of z-axis is along the vertical direction which is the opposite direction of the gravity. Besides, the acceleration is constant, which differs from the periodicity fluctuant acceleration of walking and climbing stairs. And when the user is moving up or down, such as ascend/descend the stairs, the foot’s movement is along the vertical direction which can be sensed well by az. We first collect az for each activity. Fig.4 shows the acceleration of different activities. Fig.4 (a) shows that when the user is standing still, az almost stays constant, and the amplitude equals to the gravity. Fig.4 (b-d) show that when the user is walking or ascending/descending the stairs, az changes periodically. Fig.4 (e) shows the process of a user ascending the elevator. The red box in the figure shows that the acceleration first gets smaller than the gravity, then gets larger. While the elevator accelerates to have an upward speed, the user is under the hypergravity condition and the az is smaller than the gravity. Then the elevator rises in a constant speed, with the user’s speed relative to the rest of the elevator. Meanwhile, the az is equal to the gravity. Finally, the elevator slows down, the user is under the weightlessness condition, and az has a negative, but bigger reading than the gravity. Fig.4 (f) shows the the process of an elevator descending which is a opposite the ascending process. Solution. To classify the user’s activities, we first segment the sequential data into windows, then classify the window by a hybrid method. Generally, the human step frequency is 1Hz to 3Hz. That is to say, the period of a step will last from 0.3s to 1s. The weightlessness and hypergravity process in the elevator will commonly last for about 2 seconds. We use a slide window with size 40, which equals to 2 seconds in time, to ensure that the window contains an entire step period during walking or a process of hypergravity and weightlessness. We classify the window into eight classes, which are the description shown in the Fig.5. Table I shows the description of each abbreviation. Firstly, we note that UST, DST and WALK obviously have a higher variance than EHG, EOW and SS. To classify this two activities groups, we use a decision tree with